
通过百舸平台快速开始搭建 RoboCasa 仿真环境并调用
一、产品简介
RoboCasa 是斯坦福大学发布的一款厨房场景机器人仿真工具,可以让您在电脑上模拟机器人执行各种厨房操作,无需真实机器人即可训练和测试。
核心能力:
- 提供 365 个厨房操作任务(拿取、放置、开关橱柜/冰箱/微波炉等),覆盖常见生活场景
- 基于 MuJoCo 物理引擎,无需额外 license 文件,开箱即用
- 内置 2200+ 小时的示教数据集,可直接用于策略训练
- 支持 Diffusion Policy 等主流机器人策略
典型使用场景:
- 在无真实机器人的情况下验证操作策略效果
- 对比不同策略模型在厨房任务中的表现
- 快速迭代和调试机器人控制算法
与 LIBERO 的主要区别:
如果您之前用过 LIBERO 仿真工具,以下是 RoboCasa 的主要不同点:
| 对比项 | LIBERO | RoboCasa |
|---|---|---|
| 任务规模 | 130 个桌面操作任务 | 365 个厨房操作任务 |
| MuJoCo 授权 | 需要 license 文件 | 无需(免费) |
| 无 GPU 渲染方式 | 需要 Xvfb | OSMesa(更简单) |
| 数据格式 | HDF5 | lerobot (parquet) |
本指南帮助您快速上手核心功能。
二、快速开始
环境准备与开发机创建
推荐硬件配置
| 配置项 | 最低要求 | 推荐配置 |
|---|---|---|
| GPU | 无 | L20 或更高规格的加速卡 |
| 内存 | 32GB | 64GB+ |
| CPU | 8 核 | 16 核+ |
| 存储 | 按需 | 100GB+(含数据集) |
说明:RoboCasa 的仿真运行可以在无 CPU 机器中运行。但 GPU 能提供更高的仿真效率
1.1 创建开发机
打开百舸控制台 → 进入开发机页面 → 点击【创建实例】,按以下信息配置:
基本信息:
| 配置项 | 填写说明 |
|---|---|
| 实例名称 | 自定义命名 |
| 资源池类型/资源池/队列 | 根据您已有的资源池类型选择 |
| 资源规格 | 按上方推荐硬件配置选择 |
| 云磁盘 | 推荐预留 50GiB,保证运行空间 |
访问配置:
- 配置自定义端口:开启端口 8100(用于后续远程调用仿真服务,如果只做本地验证可先跳过)
- 配置 BLB:如需远程调用,请配置 BLB

填写完成后点击【确定】,等待开发机创建完成。
1.2 登录开发机
创建成功后,在开发机列表中找到刚创建的实例,等待状态变为「运行中」后,点击【登录】进入终端。
提示:如果开发机状态长时间处于「创建中」,请检查资源池是否有可用资源。 开发机镜像中已经预装了完整的 RoboCasa 环境,目录结构如下:
1/root/workspace/
2├── robocasa/ # RoboCasa 主程序(含厨房场景资源 23GB)
3│ └── robocasa-quickstart.ipynb # 本文件
4├── robosuite/ # robosuite 仿真框架
5└── baige/ # 百舸预置脚本(包含一键启动、验证等工具)进入robocasa-quickstart.ipynb后,选择 RoboCasa 内核环境

下载资产
1# 从百度 BOS 下载
2bcecmd bos cp -r bos:/aihc-rdw-bj/robocasa-assets/ /root/workspace/robocasa/robocasa/models/assets/环境可用性检查
1import os
2import sys
3
4os.environ.setdefault("MUJOCO_GL", "osmesa")
5os.environ.setdefault("PYOPENGL_PLATFORM", "osmesa")
6
7import numpy as np1"""
2RoboCasa 快速验证
3测试内容:
4 1. 创建环境(PnPCounterToCab 任务)
5 2. reset + 随机 step × 5
6 3. 打印 obs keys 和 reward
7 4. 渲染一帧并保存为 PNG
8运行方式:
9 MUJOCO_GL=osmesa python baige/robocasa_test_getting_started.py
10 或
11 sh baige/robocasa_headless_run.sh python baige/robocasa_test_getting_started.py
12"""
13
14print("=== RoboCasa 环境验证 ===\n")
15
16# 1. 导入
17try:
18 import robosuite
19 import robocasa
20 print(f"robosuite 版本: {robosuite.__version__}")
21 print(f"robocasa 路径: {robocasa.__path__[0]}")
22except ImportError as e:
23 print(f"[ERROR] 导入失败: {e}")
24 sys.exit(1)
25
26import robosuite as suite
27from robosuite.controllers import load_composite_controller_config
28
29# 2. 创建环境
30print("\n[1/4] 创建环境 (PnPCounterToCab)...")
31try:
32 controller_config = load_composite_controller_config(robot="PandaOmron")
33 env = suite.make(
34 env_name="PickPlaceCounterToCabinet",
35 robots="PandaOmron",
36 controller_configs=controller_config,
37 has_renderer=False,
38 has_offscreen_renderer=True,
39 use_camera_obs=True,
40 camera_names=["robot0_agentview_center"],
41 camera_heights=128,
42 camera_widths=128,
43 render_gpu_device_id=-1, # -1 = CPU/osmesa
44 )
45 print(" 环境创建成功")
46except Exception as e:
47 print(f"[ERROR] 创建环境失败: {e}")
48 import traceback; traceback.print_exc()
49 sys.exit(1)
50
51# 3. Reset
52print("\n[2/4] Reset 环境...")
53try:
54 obs = env.reset()
55 print(f" obs keys 数量: {len(obs)}")
56 print(f" obs keys 示例: {list(obs.keys())[:8]}")
57except Exception as e:
58 print(f"[ERROR] Reset 失败: {e}")
59 import traceback; traceback.print_exc()
60 sys.exit(1)
61
62# 4. 随机 step
63print("\n[3/4] 随机 step × 5...")
64try:
65 total_reward = 0.0
66 low, high = env.action_spec
67 for i in range(5):
68 action = np.random.uniform(low, high)
69 obs, reward, done, info = env.step(action)
70 total_reward += reward
71 print(f" step {i+1}: reward={reward:.4f}, done={done}")
72 print(f" 累计 reward: {total_reward:.4f}")
73except Exception as e:
74 print(f"[ERROR] Step 失败: {e}")
75 import traceback; traceback.print_exc()
76 sys.exit(1)
77
78# 5. 渲染并保存
79print("\n[4/4] 渲染并保存图像...")
80try:
81 from PIL import Image
82 cam_key = "robot0_agentview_center_image"
83 if cam_key in obs:
84 img_array = obs[cam_key]
85 # robosuite 图像是 (H, W, 3),值域 [0,255],需要上下翻转
86 img_array = img_array[::-1]
87 img = Image.fromarray(img_array.astype(np.uint8))
88 img.save("test_frame.png")
89 print(f" 图像已保存: test_frame.png shape={img_array.shape}")
90 else:
91 print(f" [WARN] 未找到相机 obs key '{cam_key}',可用 keys: {[k for k in obs if 'image' in k]}")
92except Exception as e:
93 print(f"[ERR] {e}")
94
95env.close()
96print("\n=== 验证完成 ✓ ===")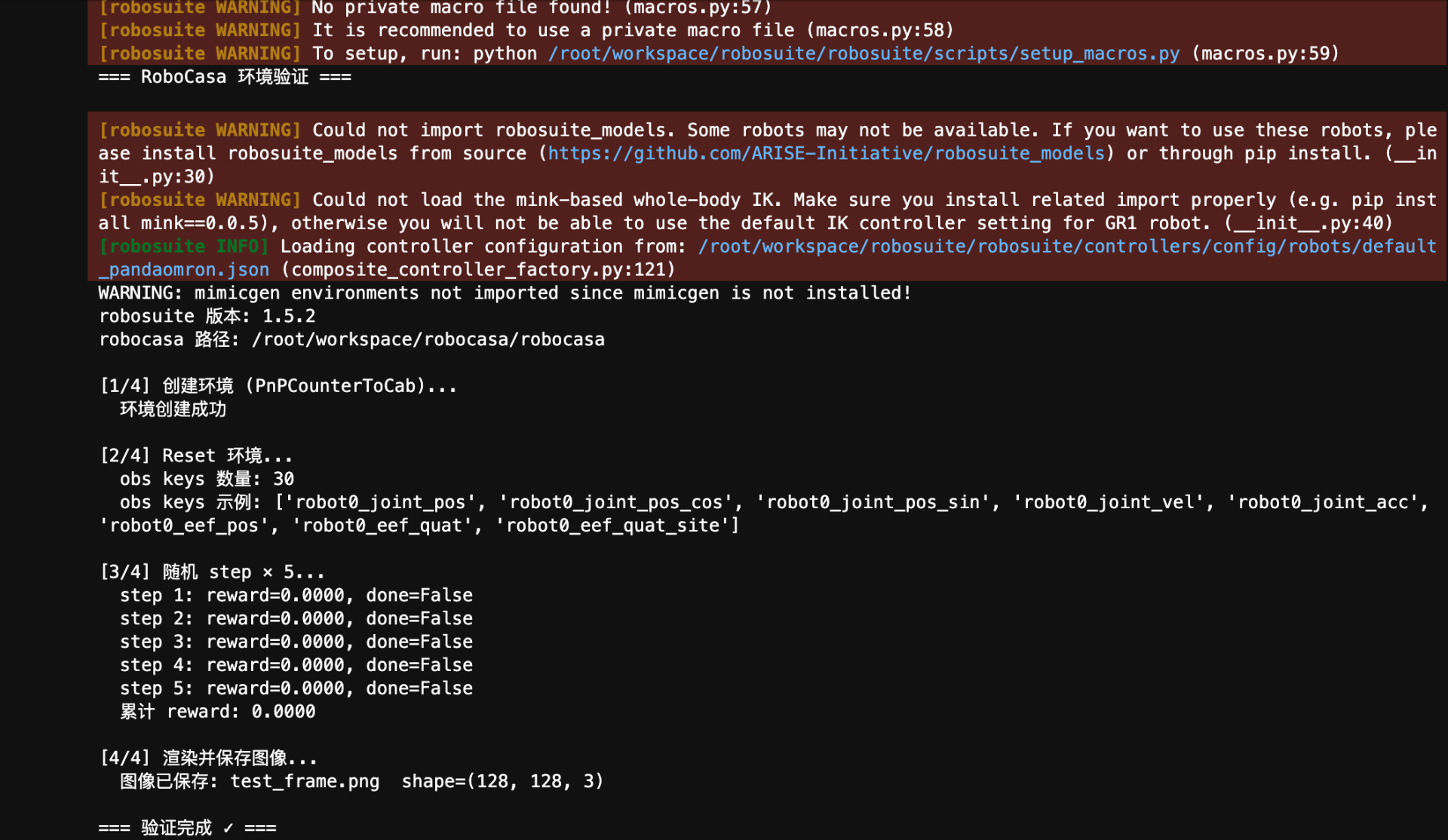

1.3 基础用法
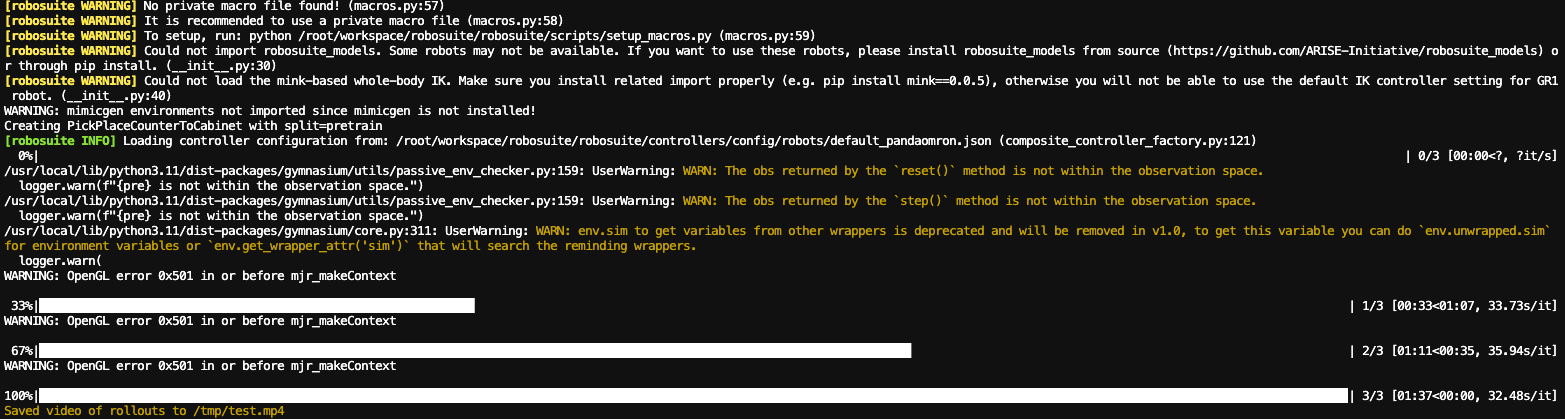
Gym 封装器
1import gymnasium as gym
2import robocasa
3from robocasa.utils.env_utils import run_random_rollouts
4
5env = gym.make(
6 "robocasa/PickPlaceCounterToCabinet",
7 split="pretrain", # use 'pretrain' or 'target' kitchen scenes and objects
8 seed=0 # seed environment as needed. set seed=None to run unseeded
9)
10
11# run rollouts with random actions and save video
12run_random_rollouts(
13 env, num_rollouts=3, num_steps=100, video_path="/tmp/test.mp4"
14)
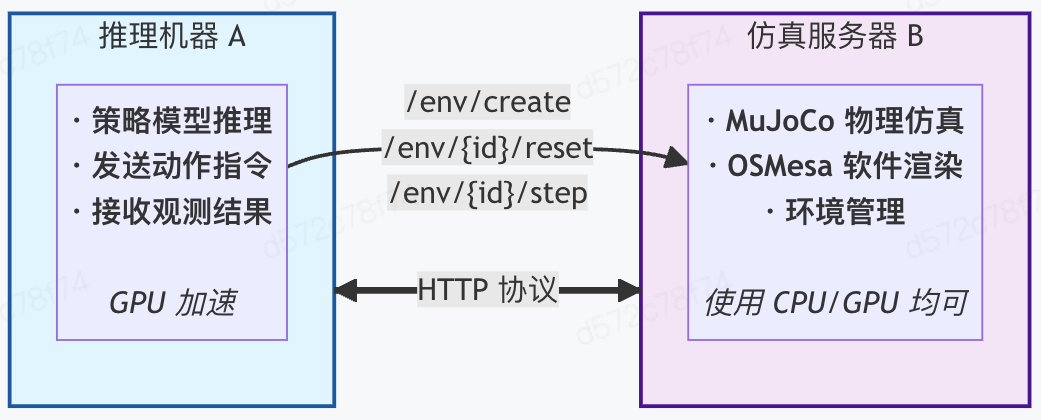
三、远程调用
场景说明
在实际使用中,您可能希望将仿真环境和策略推理部署在不同的机器上,例如:
- 仿真环境运行在一台服务器上,负责物理模拟和画面渲染
- 策略推理运行在另一台机器上,负责决策计算
- 团队中多人共享同一个仿真服务,各自运行不同的策略
此时可以使用远程调用功能,将系统拆分为两台机器通过网络通信:
创建流程
需要创建两台开发机(仿真服务器 + 推理服务器),创建步骤与「二、快速开始」相同,额外注意以下配置。
仿真服务器配置(Server B)
在开发机创建阶段,需要额外操作:
- 配置自定义端口:开启端口 8100(如在快速开始中已配置,可跳过)
- 配置 BLB:选择您使用的 BLB
创建成功后,在开发机详情页中会显示该机器的 IP 地址与仿真服务绑定端口
第一步:启动仿真服务
在仿真服务器上登录终端,执行以下命令:
1!bash ../baige/robocasa_deploy.sh
确认服务是否正常运行:
1# 健康检查
2!curl http://localhost:8100/health
3# {"status":"ok"}
4
5# 查看支持的任务列表
6!curl http://localhost:8100/tasks
7# {"common_tasks": [...], "count": 12}第二步:运行推理客户端
如果需要在远程推理服务器(或本地机器)上调用仿真服务,则需要将 <仿真服务器IP> 与<仿真服务实际对外暴露端口>替换为你实际使用的值
1%%bash
2python3.11 ../baige/robocasa_random_remote.py \
3 e# --server http://<仿真服务器IP>:<仿真服务实际对外暴露端口> \ # 远程调用
4 --server http://localhost:8100 \ # 本地运行推理用于测试
5 --task PickPlaceCounterToCabinet \
6 --n-trajs 3 \
7 --max-steps 100 \
8 --save-gif # 可选:保存仿真动画为 GIF 文件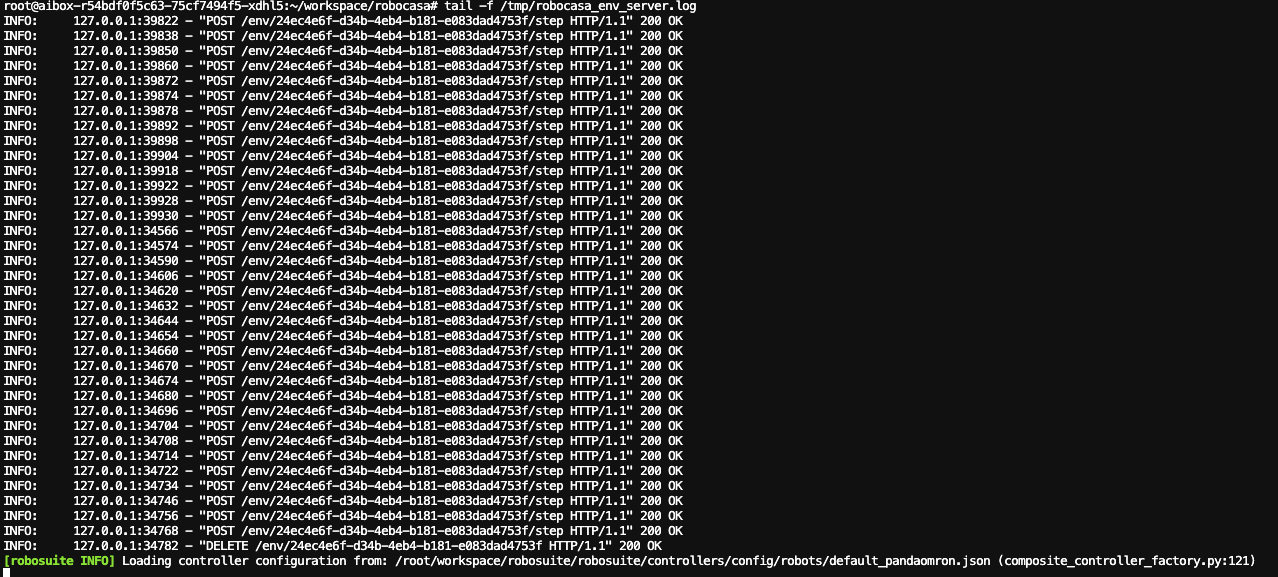
1=== RoboCasa 远程随机推理 ===
2Server : http://192.168.1.100:8100
3Task : PickPlaceCounterToCabinet
4Trajs : 3 MaxSteps: 100
5
6[✓] 服务健康: {'status': 'ok'}
7[✓] 可用任务数: 12
8
9Episode 1/3 | env_id=6e90a48f... | action_dim=12
10 reset OK | obs_keys=30
11 steps=100 | reward=0.0000 | done=False | 72.3s
12
13==================================================
14完成轨迹: 3
15平均步数: 100.0
16平均 reward: 0.0000
17成功率: 0.0% (随机策略预期 0%)
18==================================================
19
20[✓] GIF 已保存: baige/robocasa_random_rollout.gif说明:因为使用的是随机策略,所以成功率为 0% 是正常现象。实际使用请替换为训练好的策略模型
四、关键参数说明
仿真服务 API 接口
仿真服务启动后,提供以下 HTTP 接口供推理端调用:
| 接口 | 方法 | 说明 |
|---|---|---|
/health |
GET | 健康检查,确认服务是否正常 |
/tasks |
GET | 列出所有支持的仿真任务 |
/env/create |
POST | 创建一个新的仿真环境 |
/env/{env_id}/reset |
POST | 重置环境到初始状态 |
/env/{env_id}/step |
POST | 执行一个动作,获取结果 |
/env/{env_id} |
DELETE | 销毁环境,释放资源 |
创建环境示例:
1!curl -s -X POST http://localhost:8100/env/create \
2 -H "Content-Type: application/json" \
3 -d '{"task_name": "PickPlaceCounterToCabinet", "robot": "PandaOmron"}'推理客户端参数(robocasa_random_remote.py)
| 参数 | 必选 | 说明 | 默认值 |
|---|---|---|---|
--server |
是 | 仿真服务器地址(含端口) | - |
--task |
否 | 任务名称(见第五节任务列表) | PickPlaceCounterToCabinet |
--n-trajs |
否 | 评测轨迹数量(越多结果越稳定) | 3 |
--max-steps |
否 | 每条轨迹最大步数 | 50 |
--save-gif |
否 | 是否保存仿真动画为 GIF | 否 |
五、常见任务列表
以下是 RoboCasa 中常用的仿真任务。
--task参数需填写「任务名称」列中的值。
取放类任务
| 任务名称 | 说明 |
|---|---|
PickPlaceCounterToCabinet |
从台面取物放入橱柜(推荐入门) |
PickPlaceCabinetToCounter |
从橱柜取物放回台面 |
PickPlaceCounterToSink |
从台面取物放入水槽 |
PickPlaceCounterToMicrowave |
从台面取物放入微波炉 |
开关类任务
| 任务名称 | 说明 |
|---|---|
OpenCabinet |
打开橱柜门 |
CloseCabinet |
关闭橱柜门 |
OpenMicrowave |
打开微波炉 |
CloseMicrowave |
关闭微波炉 |
OpenFridge |
打开冰箱 |
CloseFridge |
关闭冰箱 |
提示:RoboCasa 共支持 365 个任务,以上仅列出最常用的。如需查看完整列表,可在 Python 中执行:
1import robocasa, robosuite
2print(list(robosuite.environments.REGISTERED_ENVS.keys()))六、最佳实践建议
- 首次使用:推荐先运行验证脚本(步骤 3),确认环境正常后再进行后续操作
- 快速测试:使用
--n-trajs 3 --max-steps 50减少测试时间,确认流程跑通后再增加数量 - 无 GPU 也能用:仿真运行不需要 GPU,使用 OSMesa 软件渲染即可,适合在 CPU 开发机上调试
- 远程调用:如果需要仿真和推理分离部署,使用内置的
env_server+ 推理客户端方案 - 任务名称注意:RoboCasa v1.0 对任务名做了重命名(如
PnPCounterToCab→PickPlaceCounterToCabinet),请使用新名称
【可选】RDP 连接运行
如果您希望有可视化界面也可以通过以下方式启动 RDP 服务:
- 开启开发机自定义端口
- 配置 3389 端口(启动脚本使用该端口)
- 使用以下命令开启开发机 RDP 服务并配置密码
1bash rdp_setup.sh
2# 使用指令配置密码
3passwd root- 然后在您的电脑上下载远程桌面客户端
- 添加电脑,输入您的 ip 地址:端口号,并配置账号名和密码
- 双击图标进入可视化界面,通过其终端执行命令即可
七、常见问题(FAQ)
Q1:运行时出现 Segmentation fault (core dumped),怎么办?
这是最常见的问题。原因是仿真引擎默认尝试使用图形界面渲染,但服务器没有显示器,导致崩溃。
解决方法: 使用百舸提供的一键启动脚本运行您的程序:
1sh /root/workspace/baige/robocasa_headless_run.sh <您的命令>脚本会自动设置正确的渲染模式。如果您需要手动设置,请确保在运行任何 Python 代码之前执行:
1export MUJOCO_GL=osmesa
2export PYOPENGL_PLATFORM=osmesa
3unset DISPLAYQ2:运行时报错 Environment PnPCounterToCab not found,怎么办?
这是因为 RoboCasa v1.0 对任务名称做了更新。请使用新名称:
| 旧名称(已废弃) | 新名称(请使用这个) |
|---|---|
PnPCounterToCab |
PickPlaceCounterToCabinet |
PnPCabToCounter |
PickPlaceCabinetToCounter |
如需查看所有可用任务名,请在 Python 中运行:
1import robocasa, robosuite
2print(list(robosuite.environments.REGISTERED_ENVS.keys()))Q3:运行时提示缺少系统库(如 libGL 或 libosmesa),怎么办?
请执行以下命令安装系统依赖:
1apt-get install -y linux-libc-dev build-essential gcc \
2 libgl1 libglib2.0-0 xvfb libosmesa6安装完成后重新运行即可。
Q4:远程调用模式下,推理客户端连不上仿真服务器?
请依次检查:
- 仿真服务是否已启动:在仿真服务器上执行
curl http://localhost:8100/health,应返回{"status":"ok"} - 两台开发机是否在同一 VPC 网络下 / 正确配置了 BLB
- BLB 是否正确配置了 8100 端口的监听
- 防火墙是否放行了 8100 端口
Q5:RoboCasa 需要 GPU 吗?
- 仅运行仿真:不需要 GPU,CPU 机器即可,使用 OSMesa 软件渲染
- 策略训练:需要 GPU(推荐支持 RTX 渲染的显卡)
评价此篇文章