
快速微调rdt-1b模型
robotics-diffusion-transformer/rdt-1b(简称rdt-1b)是一款基于扩散Transformer(Diffusion Transformer, DiT)的双臂机器人操作基础模型,专为复杂双臂协调任务设计,是目前全球最大的双臂操作扩散模型之一。
目前百舸AI计算平台提供了 rdt-1b 模型的训练模版,内置训练代码和镜像,您可以在平台分布式训练模块中,快速发起训练。
前置条件
算力和存储资源准备
算力资源
下表给出了不同模型在百舸默认参数和数据集的情况下,训练所依赖的最低配置:
| 模型名称 | 训练方式 | 训练资源配置 |
|---|---|---|
| robotics-diffusion-transformer/rdt-1b | Pretrain & Finetune | H800/A800*8卡 |
存储资源
为保证训练的性能,推荐使用并行文件存储PFS。
数据准备
rdt-1b Pretrain
多模态编码器准备
-
t5-v1_1-xxl: link,可通过百舸平台的数据下载功能从huggingface导入并使用数据转储功能转存到PFS。 -
siglip: link,可通过百舸平台的数据下载功能从huggingface导入并使用数据转储功能转存到PFS。
百舸平台已经在对象存储BOS中预置上述编码器,方便用户使用。请参考下载百舸平台预置的公共数据到PFS
1t5-v1_1-xxl:
2bos:/aihc-models-bj/robotics-diffusion-transformer/rdt-1b/google/t5-v1_1-xxl
3
4siglip:
5bos:/aihc-models-bj/robotics-diffusion-transformer/rdt-1b/google/siglip-so400m-patch14-384数据集准备
数据集要求:TFRecord格式,如果数据集不满足要求需要转换。
百舸平台已经在对象存储BOS中,预置训练数据集,方便用户快速开始。您可以从对应地域的BOS路径中下载数据。
1bos:/aihc-rdw-bj/austin_sailor_dataset_converted_externally_to_rlds训练数据加载文件准备(可选)
根据需要自定义训练数据加载文件(L71和L72请不要修改),训练时修改DATA_CONFIG为该文件路径即可。
1import tensorflow as tf
2
3from data.utils import clean_task_instruction, euler_to_quaternion, rotation_matrix_to_ortho6d
4
5def process_step(step: dict) -> dict:
6 """
7 Unify the action format and clean the task instruction.
8
9 DO NOT use python list, use tf.TensorArray instead.
10 """
11 # Convert raw action to our action
12
13 origin_action = step['action']
14 step['action']={}
15 action=step['action']
16 action['terminate'] = step['is_terminal']
17
18 eef_delta_pos = origin_action[:3]
19 eef_ang=origin_action[3:6]
20 eef_ang = euler_to_quaternion(eef_ang)
21 # gripper_open: -1-open, 1-closed
22 grip_open=tf.where(tf.equal(origin_action[6:],tf.constant(-1.0)),tf.constant(1.0),tf.constant(0.0))
23
24 # No base found
25
26 # Concatenate the action
27 action['arm_concat'] = tf.concat([eef_delta_pos,eef_ang,grip_open],axis=0)
28
29 # Write the action format
30 action['format'] = tf.constant(
31 "eef_delta_pos_x,eef_delta_pos_y,eef_delta_pos_z,eef_delta_angle_x,eef_delta_angle_y,eef_delta_angle_z,eef_delta_angle_w,gripper_open")
32
33 # Convert raw state to our state
34 state = step['observation']
35 # Concatenate the state
36 eef_mat = tf.transpose(tf.reshape(state['state'][8:], (4, 4)))
37 eef_pos = eef_mat[:3, 3]
38 rotaion_matrix = eef_mat[:3, :3]
39 eef_ang = rotation_matrix_to_ortho6d(rotaion_matrix)
40 joint_pos = state['state'][:7]
41 grip_open = state['state'][7:8] * 12.5 # rescale to [0, 1]
42 state['arm_concat'] = tf.concat([joint_pos,grip_open,eef_pos,eef_ang],axis=0)
43
44 # Write the state format
45 state['format'] = tf.constant(
46 "arm_joint_0_pos,arm_joint_1_pos,arm_joint_2_pos,arm_joint_3_pos,arm_joint_4_pos,arm_joint_5_pos,arm_joint_6_pos,gripper_joint_0_pos,eef_pos_x,eef_pos_y,eef_pos_z,eef_angle_0,eef_angle_1,eef_angle_2,eef_angle_3,eef_angle_4,eef_angle_5")
47
48 # Clean the task instruction
49 # Define the replacements (old, new) as a dictionary
50 replacements = {
51 '_': ' ',
52 '1f': ' ',
53 '4f': ' ',
54 '-': ' ',
55 '50': ' ',
56 '55': ' ',
57 '56': ' ',
58
59 }
60 instr = step['language_instruction']
61 instr = clean_task_instruction(instr, replacements)
62 step['observation']['natural_language_instruction'] = instr
63
64 return step
65
66
67if __name__ == "__main__":
68 import tensorflow_datasets as tfds
69 from data.utils import dataset_to_path
70
71 DATASET_DIR = 'data/datasets/openx_embod'
72 DATASET_NAME = 'rdt_data'
73 # Load the dataset
74 dataset = tfds.builder_from_directory(
75 builder_dir=dataset_to_path(
76 DATASET_NAME, DATASET_DIR))
77 dataset = dataset.as_dataset(split='all')
78
79 # Inspect the dataset
80 for episode in dataset:
81 for step in episode['steps']:
82 print(step)rdt-1b Finetune
数据集准备
用户数据集要求:HDF5格式,如果数据集不满足要求需要转换。
可使用官方数据集:https://huggingface.co/datasets/robotics-diffusion-transformer/rdt-ft-data
百舸平台已经在对象存储BOS中预置上述训练数据集,方便用户快速开始。您可以从对应地域的BOS路径中下载数据。
1bos:/aihc-rdw-bj/rdt_ft_data多模态编码器准备
同pretrain
模型权重准备
百舸平台已经在对象存储BOS中预置模型权重,方便用户快速开始。您可以从对应地域的BOS路径中下载数据。
1bos:/aihc-models-bj/robotics-diffusion-transformer/rdt-1b/ckpt/rdt-1b进行训练
- 登录百舸AI计算平台AIHC控制台。
-
进入 分布式训练 列表页面,点击创建任务,填写任务配置信息:
-
基础信息
- 任务名称:输入您的自定义任务名称
- 资源池&队列:选择已创建的资源池和队列
- 优先级:默认 中 优先级,无需更改
- 训练框架:选择Pytorch
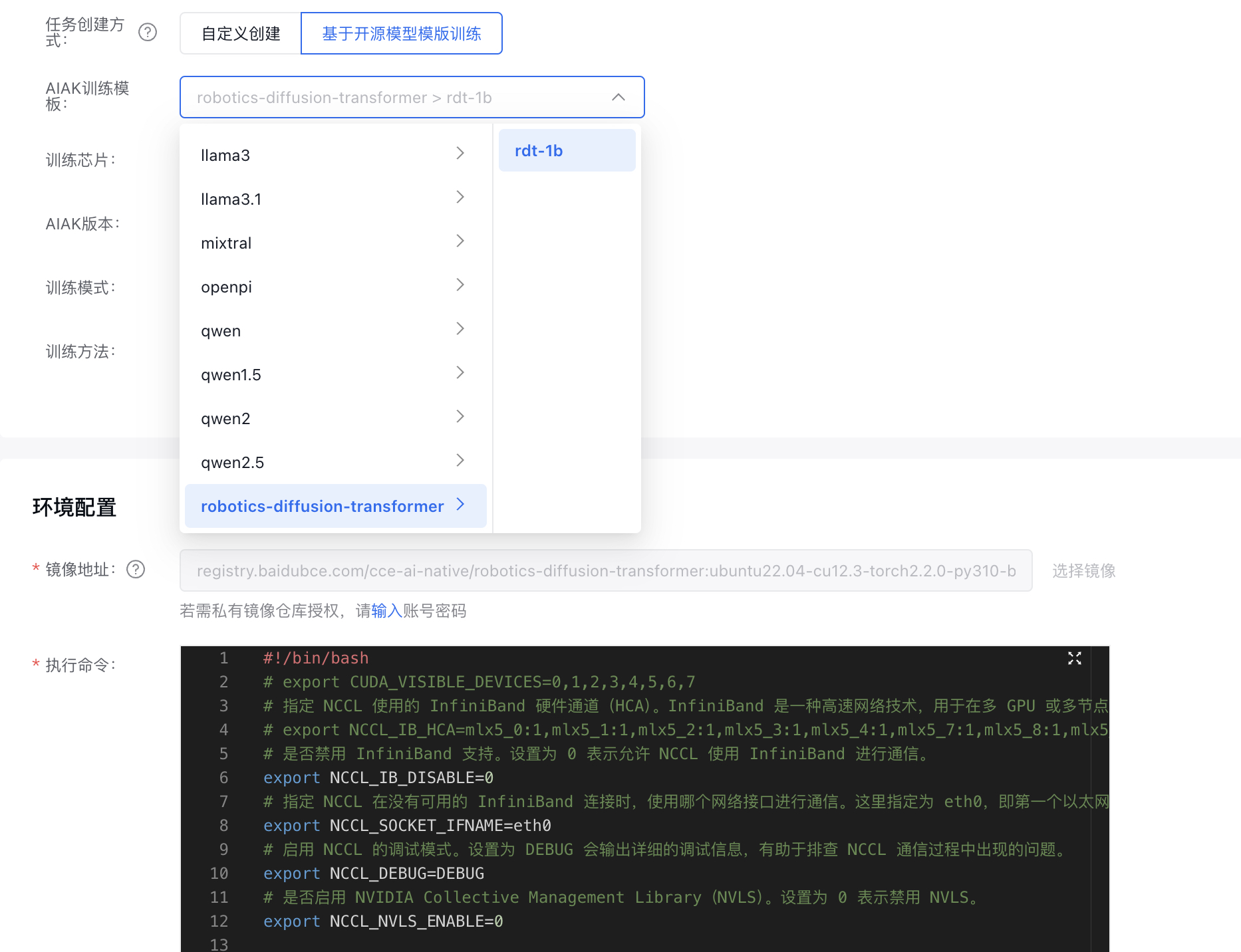
- 任务创建方式: 选择 基于开源模型训练模版创建
- 模型:选择对应的模型和训练方式
-
环境配置
- 镜像地址:无需更改,平台默认提供
- 执行命令:系统已经默认训练的启动参数,需要替换
数据集、模型权重配置等配置信息 - 环境变量:无需更改
-
资源配置
- 实例数:这里我们选择的是rdt模型的微调,使用1台H800 8卡训练
- 加速芯片:这里选择提前准备的GPU,单实例8卡
- 共享内存:默认10Gi,pretrain训练,需要更新为80Gi
- RDMA:默认开启,无需更改
-
设置数据源
- 存储类型:这里选择我们提前准备的PFS
- PFS源路径:PFS的挂载路径,默认根目录,按实际情况填写
- 挂载路径:容器内的挂载路径
-
- 点击 完成,提交训练任务。
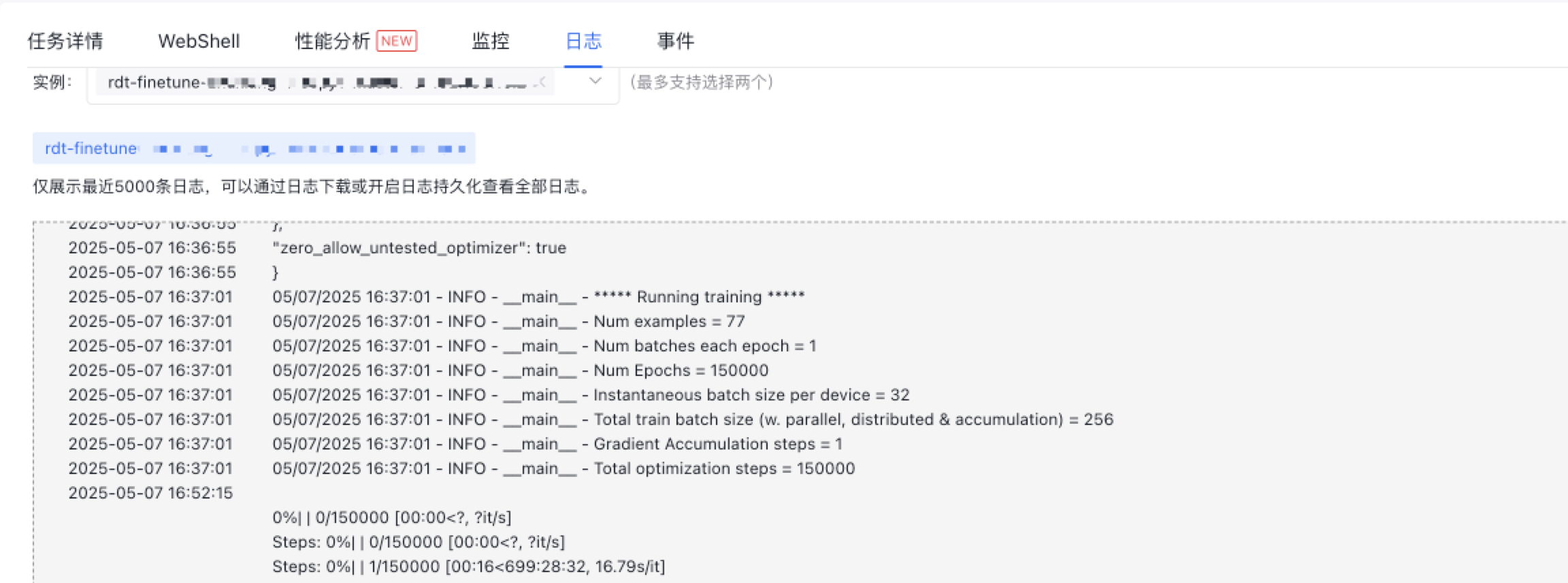
观察训练迭代
任务提交后,您可以通过任务日志观察训练的迭代情况
评价此篇文章