
Isaac Lab遥操环境搭建和图形可视化
更新时间:2025-12-12
案例介绍
本文以 Isaac lab 2.1.0 版本为例,指导客户如何搭建遥操系统采集数据以及图形的可视化
Isaac Lab提供了SE(2)和SE(3)空间的命令接口用于机器人控制:
- SE(2) teleoperation: 返回线性x-y速度和偏航角速度
- SE(3) teleoperation: 返回6维向量表示姿态变化
- 注意: 目前Isaac Lab Mimic仅在Linux上支持。
部署环境要求&最佳实践建议
| 部署要求 | 最佳实践 | |
|---|---|---|
| CPU | 建议8核及以上 | 按需 |
| 内存 | 建议64G及以上 | 按需 |
| GPU | L20等 支持RT Core的NVIDIA GPU卡 1卡及以上 | 按需 |
| CDS | 按需 | 按需 |
| 其它 | 无 | 无 |
使用需知:
- 由于该工具的较多场景需要访问外网,可以通过设置服务网卡,并设置HTTPS网络代理支持访问。服务网卡的配置参考
- 建议在距离您最近的地域创建开发机实例使用当前方案。如果远程桌面不流畅,建议配置 RDP 比特率为16位
使用说明
1. 创建与登录开发机
1.1 创建开发机实例

点击在开发机中打开,创建开发机,主要配置如下:
-
资源配置:
- GPU选择: 建议使用 NVIDIA L20
- CPU/内存:推荐8核64G及以上,保证运行所需的基础资源配置
- 启动自定义端口,选择支持公网访问的BLB(建议选择网络带宽≥50Mbps的BLB,带宽越大越好,越少共享复用越好)
-
新增访问端口:
- 服务名称:rdp
- 开发机容器监听端口:3389
- BLB监听端口:随机分配即可
1.2 登录开发机
填写完表单,提交后,在开发机列表可见创建的开发机,等待资源调度并部署成功后,点击登录,即可进入开发机webIDE

2. 配置访问远程桌面
登录开发机,进入开发机webIDE,打开Terminal界面
2.1 设置RDP远程桌面登陆的账号密码
使用chpasswd工具设置RDP远程桌面登陆的账号密码
Plain Text
1echo "root:xrdp-aihc" | chpasswd其中,
root:为设置用户名。xrdp-aihc:为登陆密码,请替换为你的密码。chpasswd:Linux 系统中一个用于批量设置或者更新用户密码的实用命令行工具,支持从标准输入或指定的文件中读取用户名和密码的组合,然后自动完成密码修改
2.2 启动RDP服务
启动 RDP 服务
Plain Text
1/usr/bin/supervisord -c /etc/supervisor/conf.d/xrdp.conf2.3 通过桌面客户端访问
在本地电脑或者需要连接开发机Isaac SIm环境的电脑,安装Windows App。以Mac为例,从app store安装

本次安装后,
- 在Windows APP 中依次点击右上角的**加号** 和 **添加电脑** 菜单,新建远程连接
- 将从开发机复制的 RDP 的公网地址加端口(公网地址可从开发机详情页的自定义端口配置区域获取)输入到访问地址栏

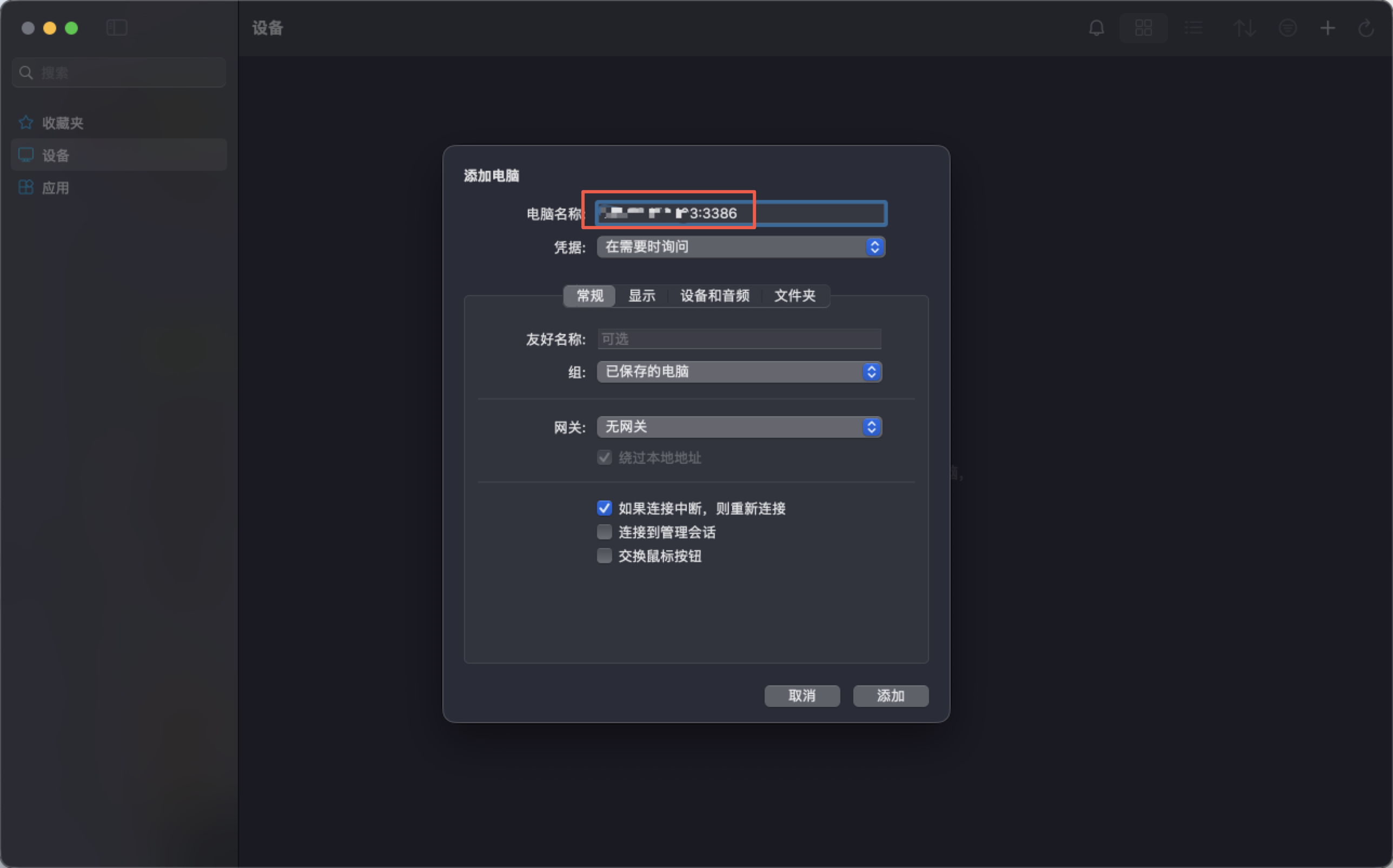
- 输入2.1步骤中中设置的用户名和密码
- 登陆远程桌面
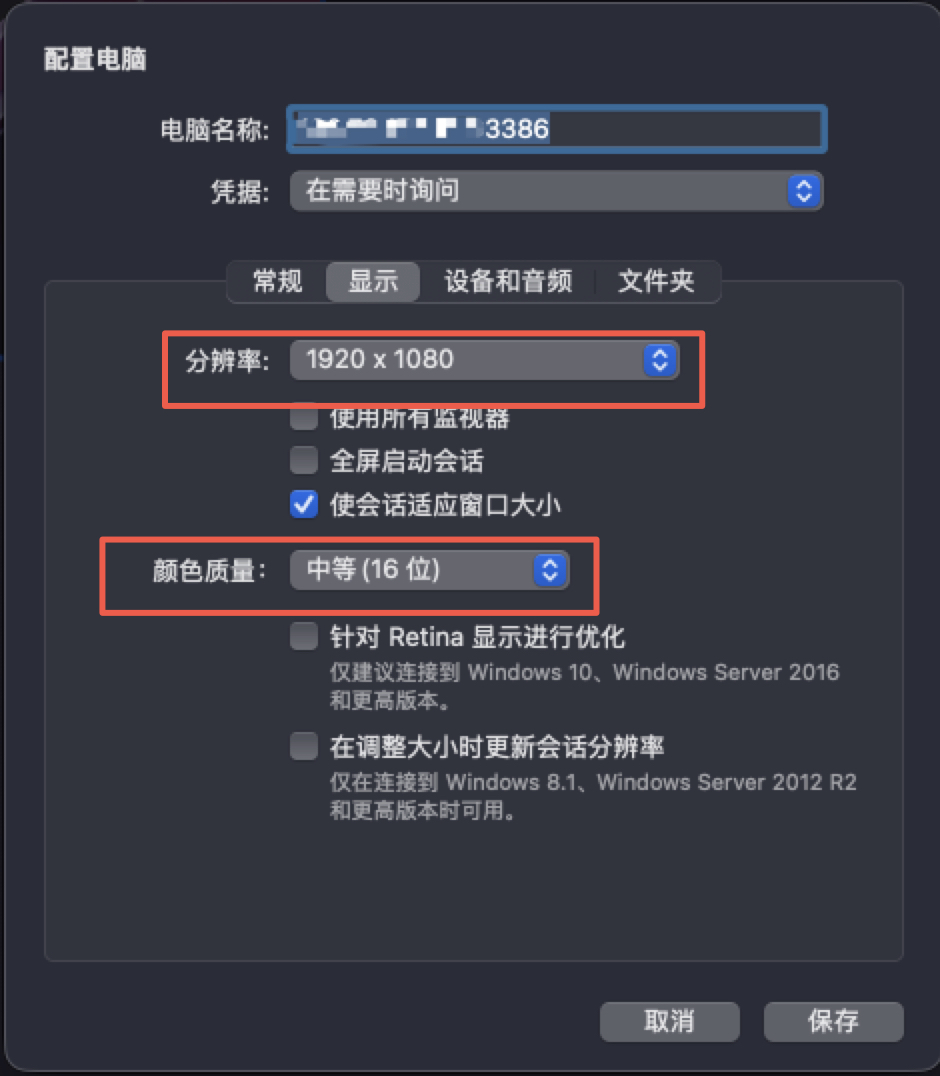
- 如果您的远程桌面在运行过程中出现卡顿现象,建议您降低远程连接的分辨率和颜色质量
3. 案例演示
登录到远程桌面,打开远程桌面的命令行工具

3.1 使用键盘进行遥操
以Isaac-Stack-Cube-Franka-IK-Rel-v0为例,建议启动前建议设置HTTP和HTTPS网络代理。
Plain Text
1 mkdir -p datasets
2
3 #可通过 ./isaaclab.sh -p scripts/environments/list_envs.py 查看环境列表,根据需要切换环境
4
5 #使用键盘操作启动 Isaac-Stack-Cube-Franka-IK-Rel-v0 任务
6 ./isaaclab.sh -p scripts/tools/record_demos.py \
7 --task Isaac-Stack-Cube-Franka-IK-Rel-v0 \
8 --teleop_device keyboard \
9 --dataset_file ./datasets/dataset.hdf5 \
10 --num_demos 10-
参数详解
-
必需参数
- --task TASK: 指定要运行的任务环境名称(如Isaac-Stack-Cube-Franka-IK-Rel-v0)
-
可选参数
- --teleop_device TELEOP_DEVICE: 指定遥操作设备类型(keyboard, spacemouse, handtracking等)
- --dataset_file DATASET_FILE: 指定保存演示数据的文件路径(HDF5格式)
- --step_hz STEP_HZ: 控制演示收集的频率(每秒步数)
- --num_demos NUM_DEMOS: 指定要收集的演示episode数量
- --num_success_steps NUM_SUCCESS_STEPS: 指定成功episode所需的最小步数
- --enable_pinocchio: 启用Pinocchio动力学库
-
-
操作指南
-
SE(3) 键盘控制器:Se3Keyboard
- 重置所有指令:R
- 切换夹爪(打开/关闭):K
- 沿x轴移动机械臂:W/S
- 沿y轴移动机械臂:A/D
- 沿z轴移动机械臂:Q/E
- 绕x轴旋转机械臂:Z/X
- 绕y轴旋转机械臂:T/G
- 绕z轴旋转机械臂:C/V
-


验证回放数据
Plain Text
1./isaaclab.sh -p scripts/tools/replay_demos.py \
2 --task Isaac-Stack-Cube-Franka-IK-Rel-v0 \
3 --dataset_file ./datasets/dataset.hdf5
3.2 使用空间鼠标进行遥操
以Isaac-Stack-Cube-Franka-IK-Rel-v0为例,建议启动前建议设置HTTP和HTTPS网络代理。
Plain Text
1 #使用SpaceMouse(空间鼠标)操作 启动 Isaac-Stack-Cube-Franka-IK-Rel-v0 任务
2 ./isaaclab.sh -p scripts/tools/record_demos.py \
3 --task Isaac-Stack-Cube-Franka-IK-Rel-v0 \
4 --teleop_device spacemouse \
5 --dataset_file ./datasets/dataset.hdf5 \
6 --num_demos 10-
操作指南
-
SE(3) SpaceMouse 控制器:Se3SpaceMouse
- 重置所有指令:右键单击
- 切换夹爪(打开/关闭):单击 SpaceMouse 左键
- 沿 x/y 轴移动机械臂:倾斜 SpaceMouse
- 沿 z 轴移动机械臂:推或拉 SpaceMouse
- 旋转机械臂:扭转 SpaceMouse
-
同时,Isaac lab 可通过Apple Vision Pro 遥操收集数据,具体请参考:https://isaac-sim.github.io/IsaacLab/main/source/overview/imitation-learning/teleop_imitation.html
评价此篇文章