
Apollo-Model-Deployment
为加速 BEV感知模型从研发到验证的闭环,Apollo 自动驾驶平台提供了一套开箱即用的工具链,涵盖模型训练(Apollo-BEV-Train) → 模型导出(Apollo-BEV-Model-Export) → 模型验证(Apollo-Model-Deployment)三大核心阶段。用户可按此顺序依次使用三个标准化环境,高效完成 BEV 模型的开发与评估。
Apollo 自动驾驶开放平台介绍
Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套 属于自己的自动驾驶系统。
开放能力、共享资源、加速创新、持续共赢是 Apollo 开放平台的口号。百度把自己所拥有的强大、成熟、安全的自动驾驶技术和数据开 放给业界,旨在建立一个以合作为中心的生态体系,发挥百度在人工智能领域的技术优势,为合作伙伴赋能,共同促进自动驾驶产业的发 展和创新。
Apollo 自动驾驶开放平台为开发者提供了丰富的车辆、硬件选择,强大的环境感知、高精定位、路径规划、车辆控制等自动驾驶软件能 力以及高精地图、仿真、数据流水线等自动驾驶云服务,帮助开发者从 0 到 1 快速搭建一套自动驾驶系统。
部署环境要求&最佳实践建议
| 部署要求 | 最佳实践 | |
|---|---|---|
| CPU | 按需 | 建议按表单默认值及以上 |
| 内存 | 按需 | 建议按表单默认值及以上 |
| GPU | 24G以上显存 | 建议24G以上显存 |
| CDS | 按需 | 按需 |
使用说明
创建与登录开发机
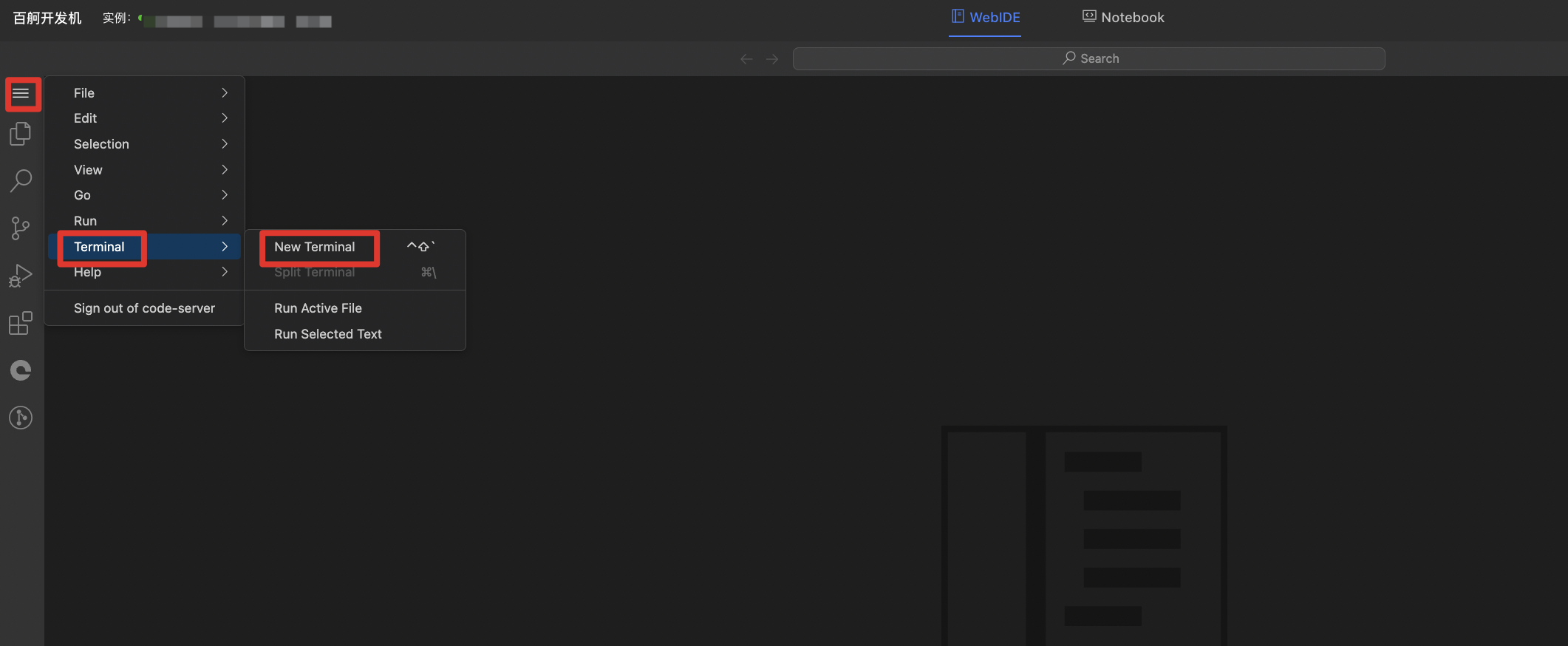
根据部署环境要求成功创建开发机后,点击登录开发机,进入开发机webIDE,并打开VScode中的terminal
- 代码保存路径:/apollo_workspace
- 数据默认挂载路径:/mnt/pfs/nuscenes_data/bev_data/nuscenes
Apollo环境中替换自己训练的ONNX文件
如果要替换为自己训练的onnx文件,则需要替换掉目录下的onnx文件
1sudo rm -rf /apollo/modules/perception/data/models/apollo_bevnet_onnx/apollo_bevnet.onnx
2sudo cp your-own-onnx.onnx /apollo/modules/perception/data/models/apollo_bevnet_onnx/apollo_bevnet.onnxApollo中运行纯视觉模型
准备record数据 通过下面链接可以下载nuscenes record:
选择车型环境使用,应用参数
1aem profile use nuscenes_occ打开dreamview_plus
1aem bootstrap start --plus网页显示dreamview_plus方式:
1访问方式(选择其一):
2
3 方式1 - 百舸平台打开:
4 1. 执行脚本后,点击ports,选择8888端口的Fowarded Address的链接使用鼠标右键选择“Open in Browser”
5
6 方式2 - SSH端口转发
7 1. 在本地电脑执行: ssh -L 8888:localhost:8888 -p ssh映射端口 user@server_ip
8 2. 浏览器打开: http://localhost:8888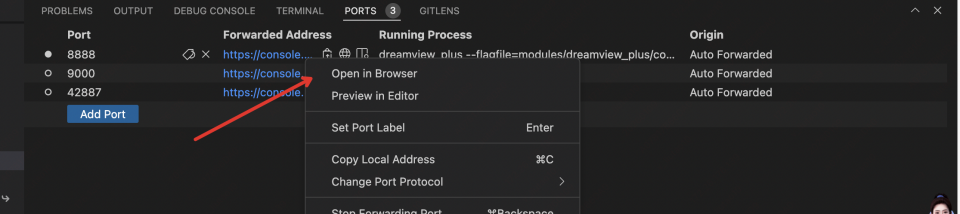
终端启动transform dag文件
1mainboard -d /apollo/modules/transform/dag/static_transform.dag终端启动感知 dag文件
1mainboard -d /apollo/modules/perception/camera_detection_occupancy/dag/camera_detection_occupancy_nus.dag等待模型进行序列化,当终端给出如下日志时表示序列化完成,可进行下面的步骤
 打开终端播放record包
打开终端播放record包
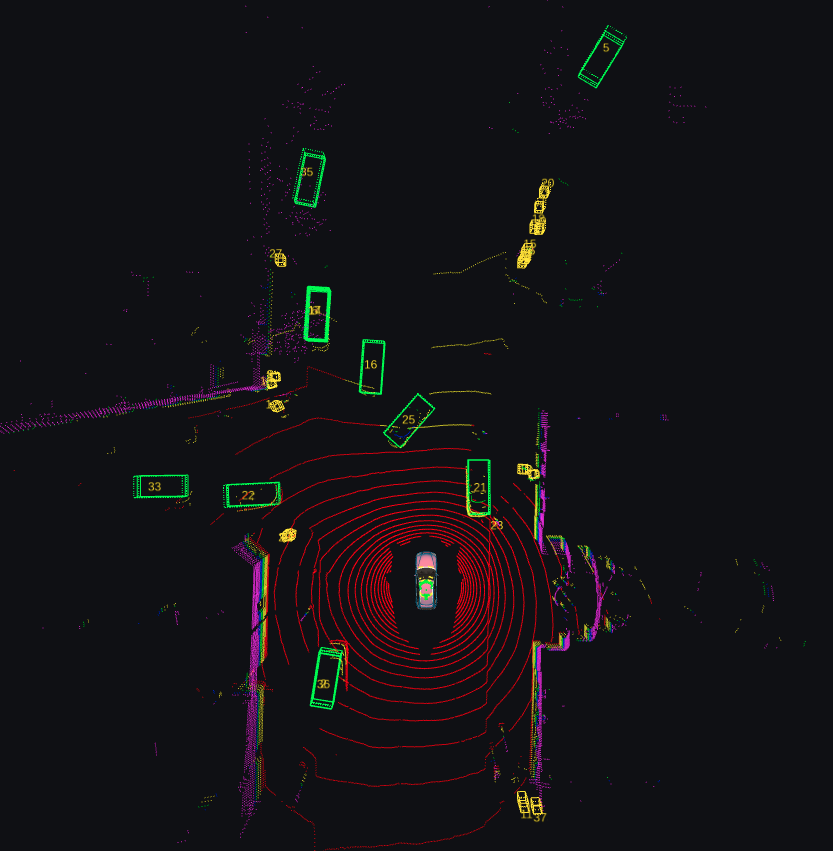
1cyber_recorder play -f 包名.record随后就可以在dreamview_plus页面上看到目标检测结果
可视化occ结果
如果要查看occ结果,需要进行如下的步骤:
将配置occ_det_nus.pb.txt中save_occ_result设置为true,同时设置保存路径occ_save_path(默认路径为/apollo/data/occ_results)
Web端OCC可视化(支持远程访问)工具使用:
1cd /apollo_workspace/bev_tools
2python3 occ_vis.py备注: 查看其他occ文件效果 修改occ_vis.py代码
1 #代码行数,470行
2 # 检查数据文件路径
3 possible_paths = [
4 "/apollo/data/occ_results/1535489308.678113.bin"
5 ]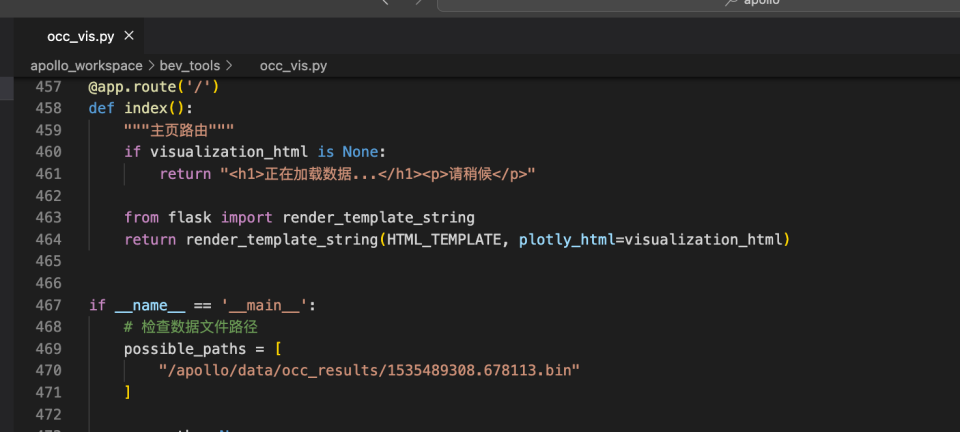 打开网页方式:
打开网页方式:
1访问方式(选择其一):
2
3 方式1 - 百舸平台打开:
4 1. 执行脚本后,点击ports,选择9000端口的Fowarded Address的链接使用鼠标右键选择“Open in Browser”
5
6 方式2 - SSH端口转发
7 1. 在本地电脑执行: ssh -L 9000:localhost:9000 -p ssh映射端口 user@server_ip
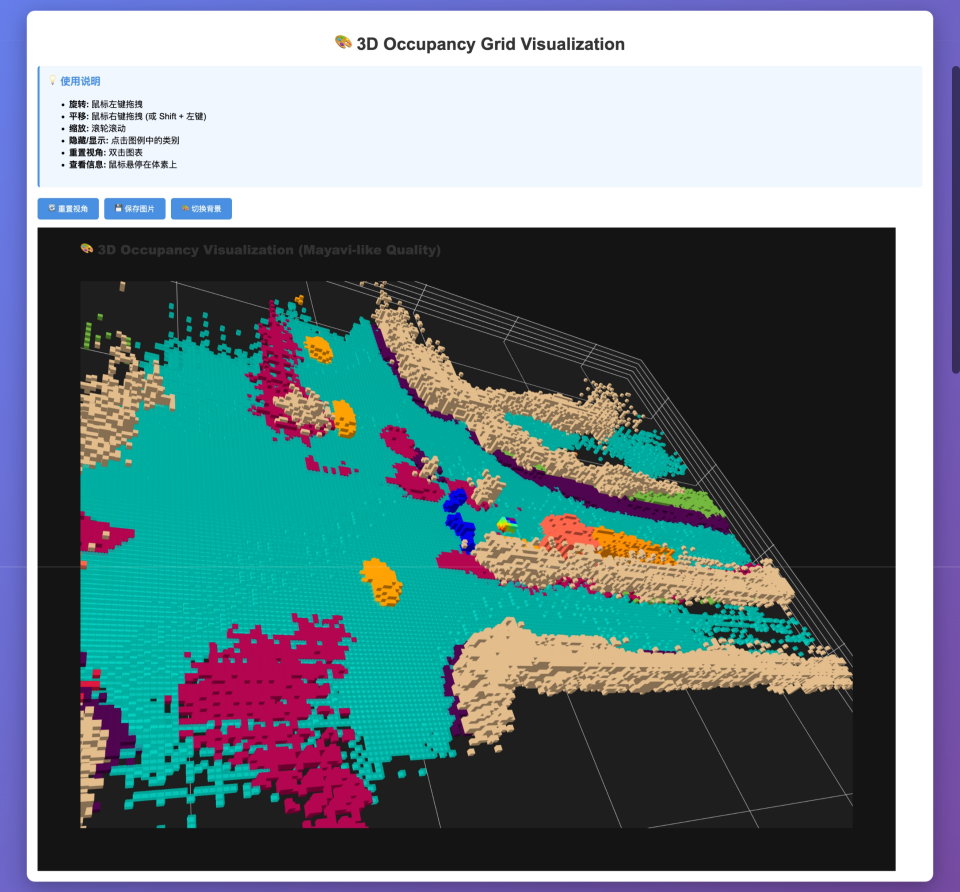
8 2. 浏览器打开: http://localhost:9000Web端OCC可视化功能,支持远程实时访问与多维度场景分析。用户可通过浏览器访问服务端口(如localhost:9000),实现跨平台、跨网络的OCC渲染,无需依赖本地显示环境。该功能完整渲染16类场景元素(含车辆、行人、植被等),并为每类元素提供专属视觉标识。支持交互式视角操作(360°旋转/平移/缩放)、视角重置及截图保存(PNG格式),显著提升调试效率,实现“启动服务→实时验证模型效果”的闭环流程。
完整颜色映射表
| 序号 | 类别名称 | 颜色 | 用途说明 |
|---|---|---|---|
| 1 | Car (轿车) | █████ Orange | 普通乘用车、小轿车 |
| 2 | Truck (卡车) | █████ Tomato | 货车、厢式货车 |
| 3 | Trailer (拖车) | █████ Dark Orange | 半挂车、拖挂车 |
| 4 | Bus (公交车) | █████ Orange Red | 公交车、大巴 |
| 5 | Construction Vehicle (工程车) | █████ Dark Salmon | 挖掘机、推土机等工程车辆 |
| 6 | Bicycle (自行车) | █████ Crimson | 自行车 |
| 7 | Motorcycle (摩托车) | █████ Red | 摩托车、电动车 |
| 8 | Pedestrian (行人) | █████ Blue | 行人 |
| 9 | Traffic Cone (交通锥) | █████ Dark Slate Grey | 交通锥、警示锥 |
| 10 | Barrier (障碍物) | █████ Slate Grey | 护栏、路障 |
| 11 | Driveable Surface (可行驶表面) | █████ nuTonomy Green | 道路、可行驶区域 |
| 12 | Other Flat (其他平面) | █████ Dark Magenta | 其他平坦区域 |
| 13 | Sidewalk (人行道) | █████ Dark Purple | 人行道、步道 |
| 14 | Terrain (地形) | █████ Yellow Green | 草地、土地等自然地形 |
| 15 | Manmade (人造物) | █████ Burlywood | 建筑物、墙体等人造结构 |
| 16 | Vegetation (植被) | █████ Green | 树木、灌木等植被 |
| - | Ego Car (自车) | █████ Rainbow | 自动驾驶车辆本身 |
附:Apollo 11.0 BEV+OCC 模型训练使用
| 流程 | 使用方式 | 备注 |
|---|---|---|
| Apollo-BEV-Train | 百舸平台 | 训练 Apollo BEV+OCC模型 |
| Apollo-BEV-Model-Export | 百舸平台 | 将训练好的BEV+OCC模型导出成onnx文件 |
| Apollo-Model-Deployment | 百舸平台或本地验证 | apollo环境镜像,验证bev模型效果以及仿真等apollo工具 |
评价此篇文章