
Isaac Sim 4.5.0 可视化实践
案例介绍
NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,本文是在开发机上基于isaac sim实现可视化能力的实践教程
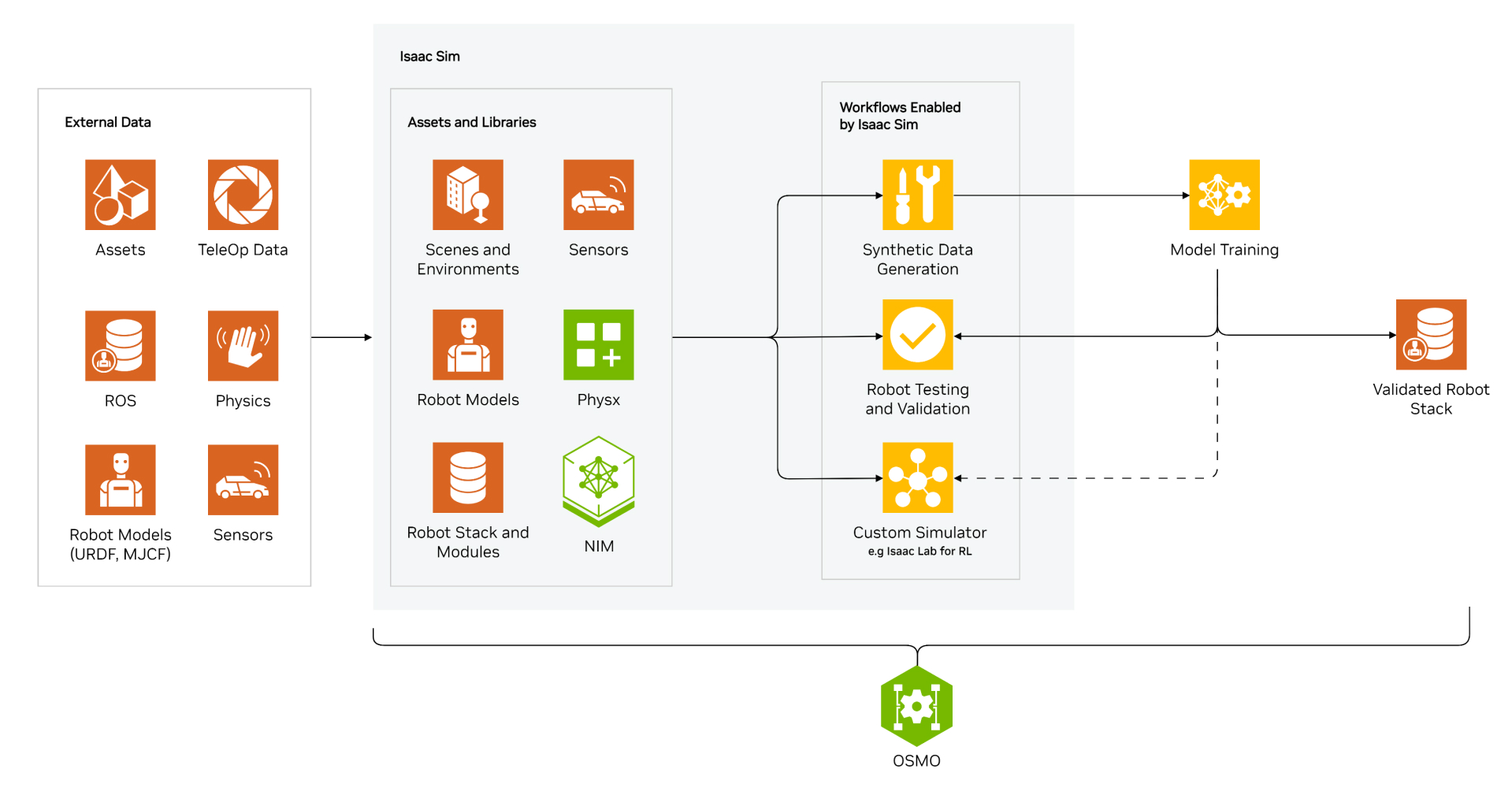 NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,支持从URDF、MJCF和CAD等常见格式导入机器人系统。通过GPU加速物理引擎来实现精确仿真,并支持大规模、多传感器RTX渲染。集成数据生成、强化学习、ROS集成和数字孪生模拟等端到端工作流程。其优势包括:
NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,支持从URDF、MJCF和CAD等常见格式导入机器人系统。通过GPU加速物理引擎来实现精确仿真,并支持大规模、多传感器RTX渲染。集成数据生成、强化学习、ROS集成和数字孪生模拟等端到端工作流程。其优势包括:
- 资产导入&导出:支持从非USD格式导入机器人和环境,或将其导出为非USD格式;
- 机器人微调:优化机器人的物理精度、计算效率或真实感;
- 机器人仿真:提供全流程运动控制工具链,如控制器、运动生成和运动学求解器以及策略集成接口;
- 传感器系统:支持RTX和物理学传感器。
官方地址:
https://docs.isaacsim.omniverse.nvidia.com/4.5.0/index.html
部署环境要求&最佳实践建议
| 部署要求 | 最佳实践 | |
|---|---|---|
| CPU | 建议8核及以上 | 按需 |
| 内存 | 建议64G及以上 | 按需 |
| GPU | Isaac Sim 4.5.0 : A800 / L20 / 支持RT Core的NVIDIA GPU卡 1卡及以上 | 按需 |
| CDS | 按需 | 按需 |
| 其它 | 无 | 无 |
使用需知:
- Isaac Sim 4.5.0的仿真渲染依赖DLSS(超采样技术,Deep Learning Super Sampling),因此推荐使用GeForce RTX系列显卡(A800没有RT core,测试效果有噪点问题,不推荐使用)
- 本案例使用L20等Ada Lovelace架构三代RT Core的显卡,且使用的BLB网络带宽为50Mbps时,无噪点,无卡顿,表现更为符合期望
- isacc官方要求,显卡驱动版本需要高于535.129 ,如果Ubuntu版本>=22.04.5 kernel 6.8.0-48-generic,则驱动至少要求在535.216.01以上
- 535驱动版本中(550无此问题),含535.255及以上的驱动版本,存在一个已知的显卡驱动判断错误,需要添加--/rtx/verifyDriverVersion/enabled=false参数,跳过显卡驱动判断(操作方式见后续步骤)
- 官方未对cuda和cudnn有限制,不同的cuda版本和cudnn版本是否对可视化界面的表现有影响未验证
- 由于该工具的较多场景需要访问外网,可以通过设置服务网卡,并设置HTTPS网络代理支持访问。服务网卡的配置参考
使用说明
本文会先介绍如何【启动可视化客户端】,然后以【执行官方四足和人形可操作演示】、【宇树GR1机器人简易操作演示】两个例子,简单介绍Isaac Sim的使用。
在试用案例之前,请确保已挂载了案例所需的数据集,否则脚本无法正常运行,可在脚本内更改数据集地址配置
1. 创建与登录开发机
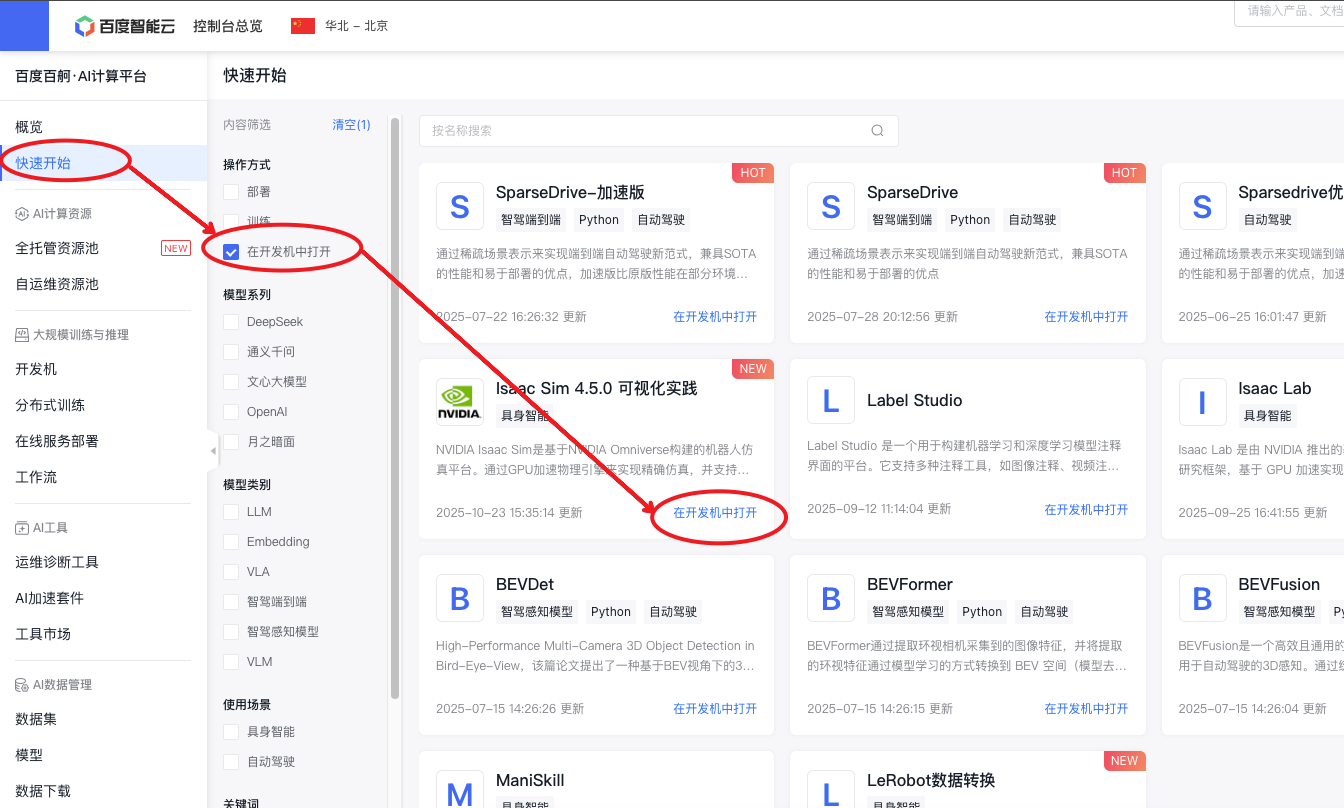
1.1 步骤一:从快速开始创建一个【Isaac Sim 4.5.0 可视化实践】开发机实例:
1.2 步骤二:填写表单
- GPU选择: 建议使用 NVIDIA L20
- 其它选项值建议参考截图表单填写(官方推荐8核64G),保证运行所需的基础资源配置
- 启用SSH,填入创建好的公钥,选择支持公网访问的BLB(建议选择网络带宽≥50Mbps的BLB,带宽越大越好,越少共享复用越好)
- 其它表单项默认即可


1.3 步骤三:创建并登录开发机
填写完表单,提交后,在开发机列表可见创建的开发机,等待资源调度并部署成功后,点击登录,即可进入开发机webIDE
 主要路径介绍
主要路径介绍
- Isaac Sim USD资产挂载路径:/mnt/bos/isaac-sim,该目录下存有Isaac Sim预置的部分USD资产。
1.4 验证GPU硬件和显卡驱动版本
根据部署环境要求成功创建开发机后,点击登录开发机,进入开发机webIDE,打开Terminal界面:
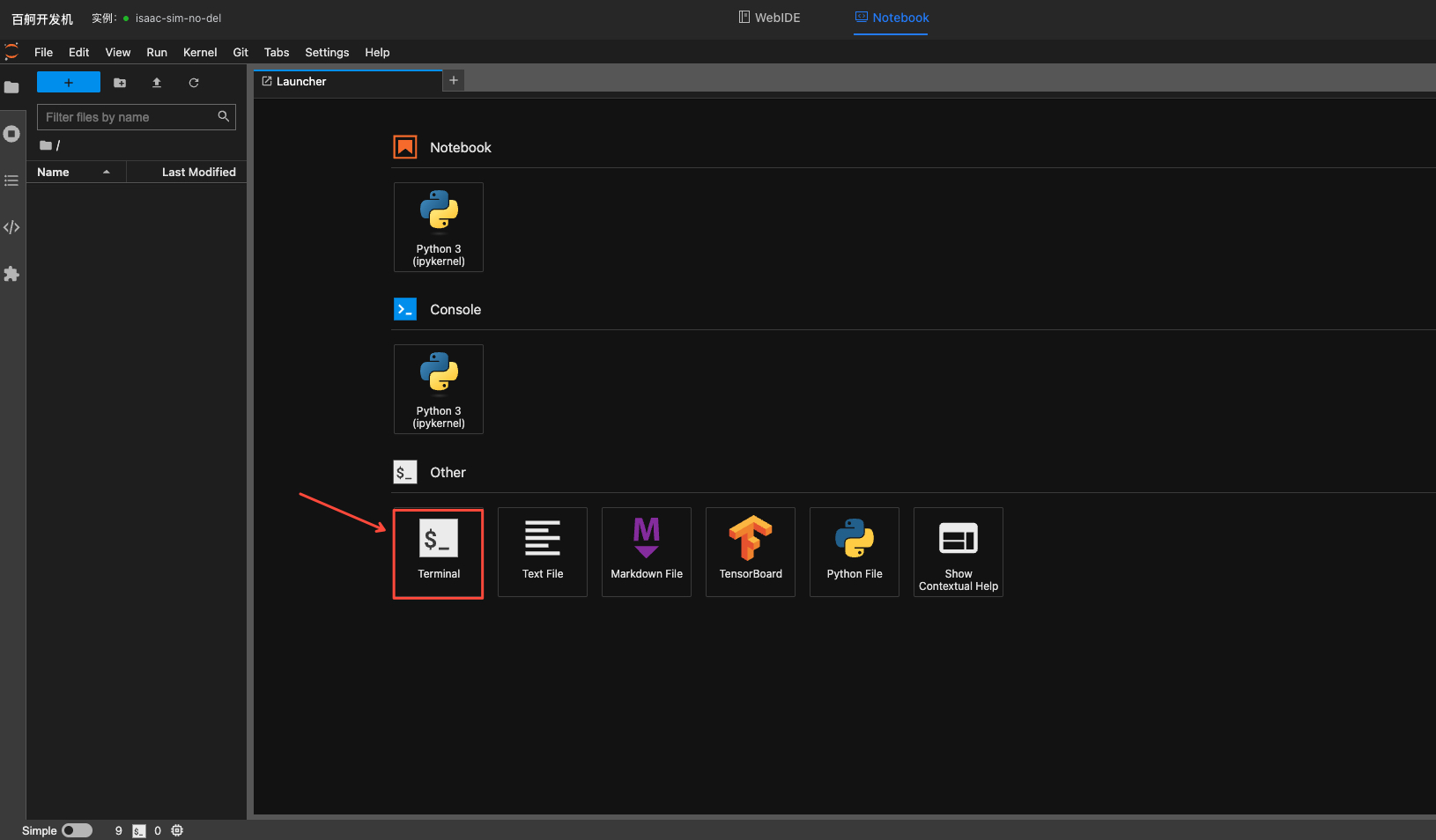 在打开的Terminal界面内输入以下命令,确认NVIDIA的GPU硬件和显卡驱动版本
在打开的Terminal界面内输入以下命令,确认NVIDIA的GPU硬件和显卡驱动版本
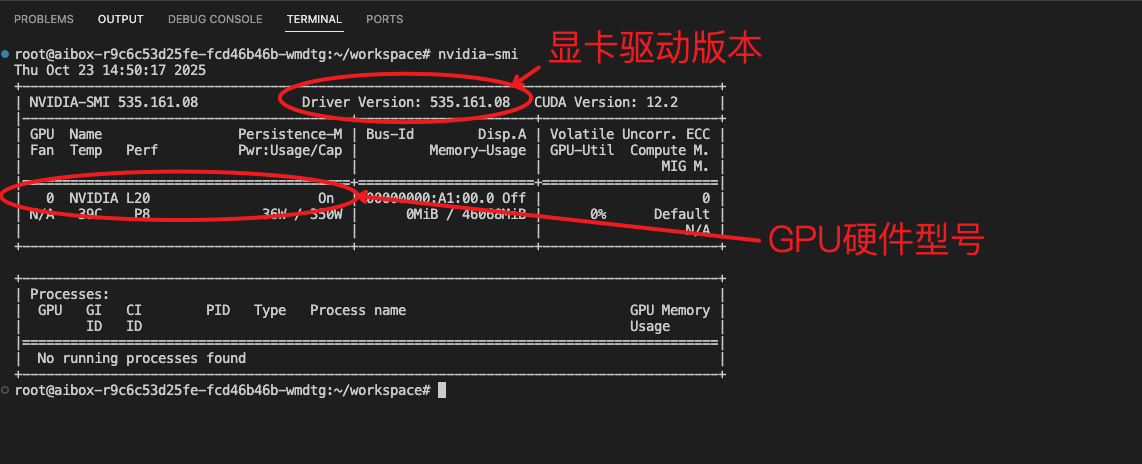
1nvidia-smi执行结果查看,红圈中是显卡驱动版本和GPU硬件型号
请参考我们下面提出的建议,选择驱动版本
- isacc官方要求,显卡驱动版本需要高于535.129 ,如果Ubuntu版本>=22.04.5 kernel 6.8.0-48-generic,则驱动至少要求在535.216.01以上
- 535驱动版本中(550无此问题),含535.255及以上的驱动版本,存在一个已知的显卡驱动判断错误,需要添加--/rtx/verifyDriverVersion/enabled=false参数,跳过显卡驱动判断(操作方式见后续步骤)
- 官方未对cuda和cudnn有限制,不同的cuda版本和cudnn版本是否对可视化界面的表现有影响未验证
1.5 节点调整显卡驱动版本,即重装系统(如果驱动版本满足,可跳过)
如显卡驱动不符合建议,则建议重装节点驱动: 建议使用百舸的驱动推荐版本,如果推荐的驱动无法满足业务需求,可进入BCC进行重装操作,有更多的版本选择
重装步骤: 从资源池中移除节点 -> 在bcc中重装系统并调整显卡驱动版本 -> 将节点重新加入资源池
备注:因为全托管资源池使用的推荐驱动版本和Isaac sim客户端的适配性没有问题,所以此处只覆盖自运维资源池的重装步骤
1.5.1 从资源池中移除节点
1、在百舸页面中,选择开发机所在的资源池,点击进入详情界面

2、点击希望重装驱动的节点(eg:如果GPU卡选择了L20,则需要更新所有L20的节点),记录下来实例ID(整个流程都会用到),操作移出节点,弹出窗口
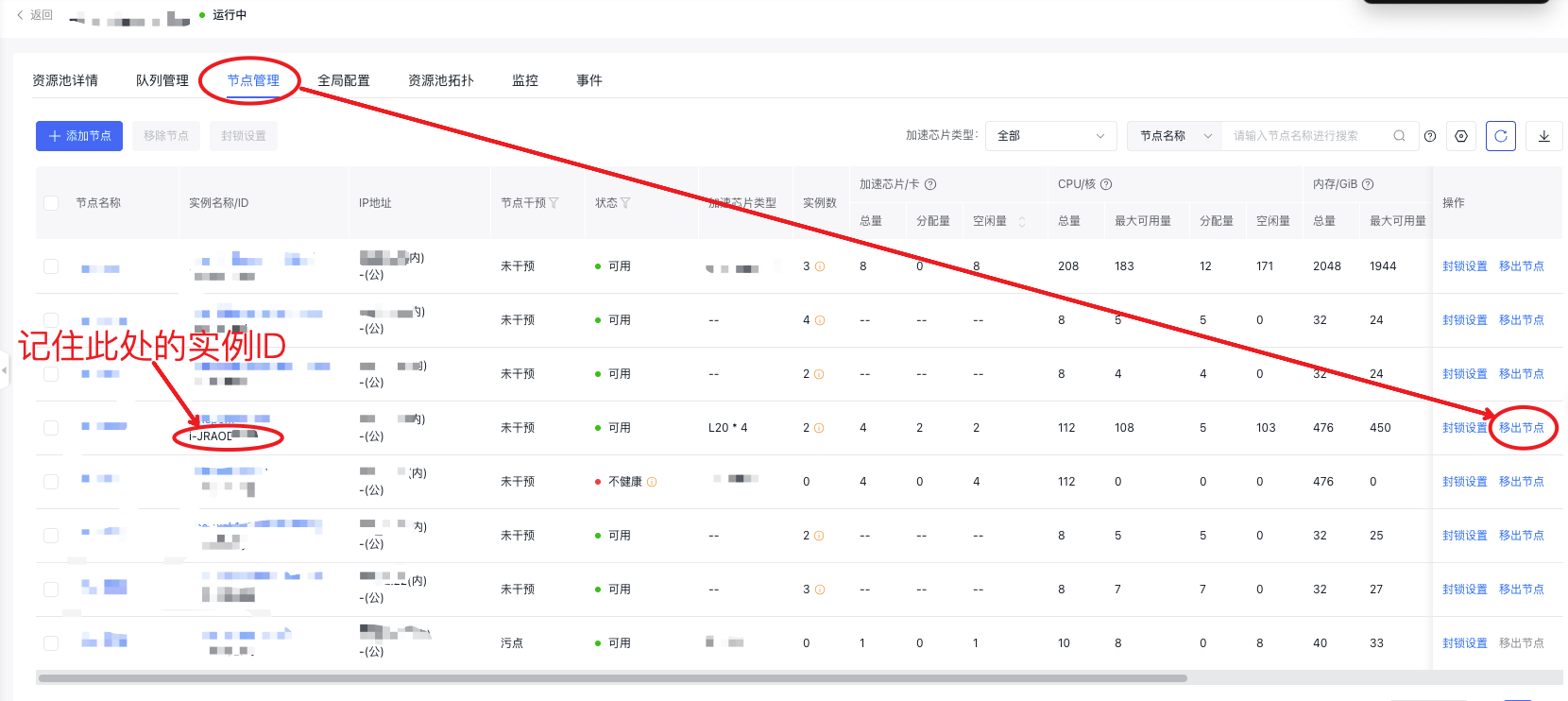
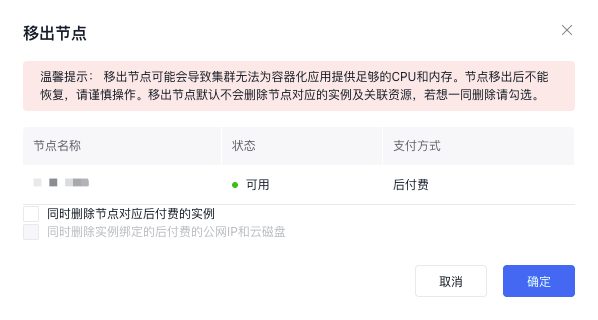
3、在下面弹窗中,无需勾选复选框,直接点击确定即可
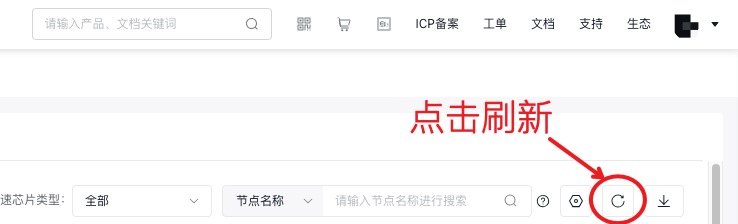
4、等待移出完成(需要刷新页面或者用右上角刷新按钮才能看到状态更新)
1.5.2 在bcc中重装系统并调整显卡驱动版本
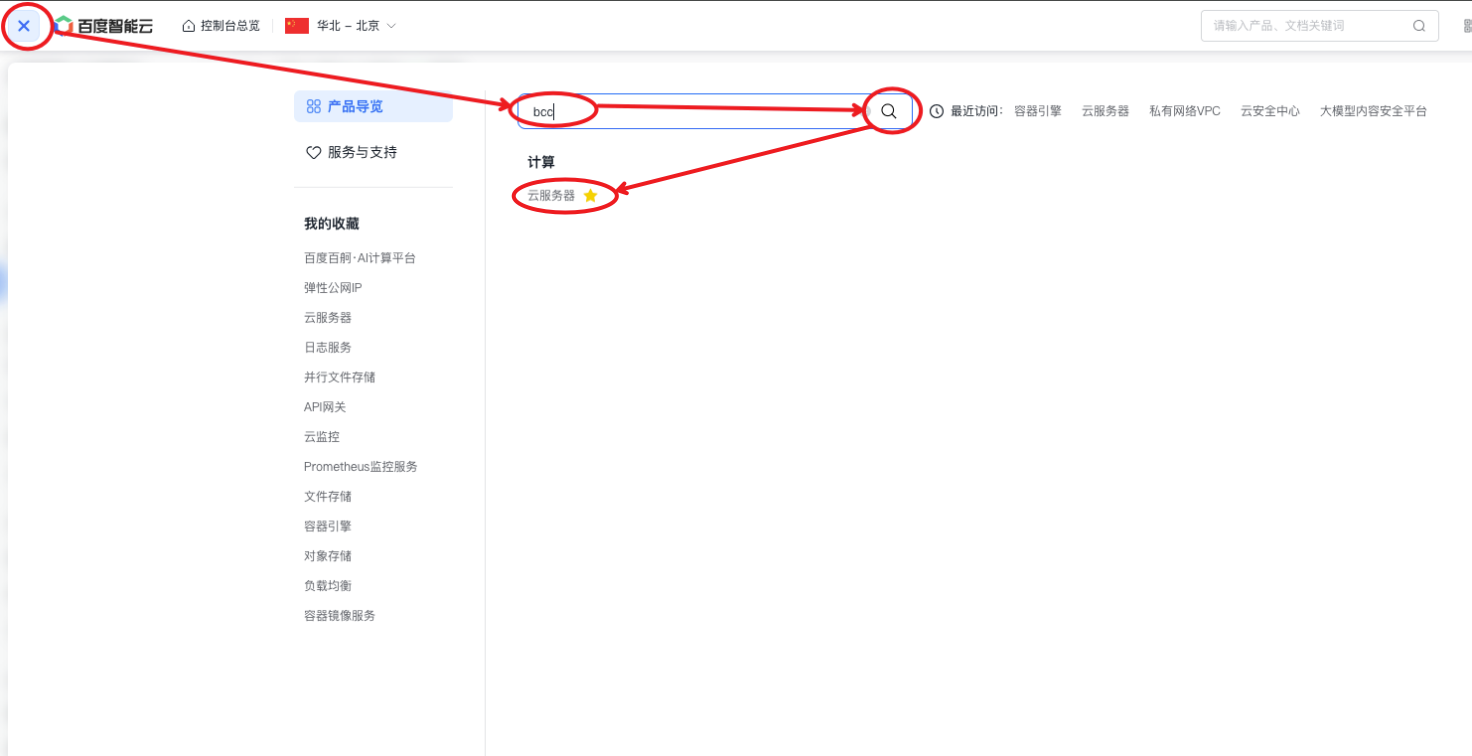
1、进入bcc:点击左上角,打开导航页,搜索bcc,然后点击【云服务器】,进入bcc界面
 2、找到对应节点,并操作
2、找到对应节点,并操作
使用刚才记录的实例ID,在bcc中搜索,并操作【重装操作系统】(重装操作系统只有移出节点之后才能操作)
 3、系统和驱动版本选择
3、系统和驱动版本选择
重装操作系统,建议选择Ubuntu的22.04版本作为os,然后选择目标Driver版本,cuda版本和CUDNN版本可按需选择,对isaac sim可视化客户端没有影响
 4、设置root密码,点击确定,开始重装系统
4、设置root密码,点击确定,开始重装系统
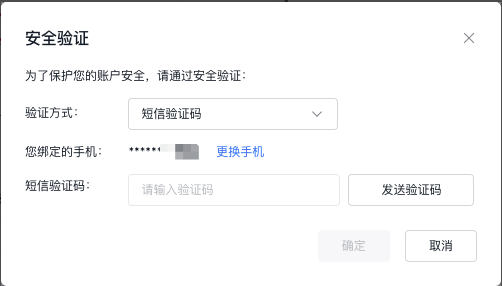
 5、安全验证,输入短信验证码
5、安全验证,输入短信验证码
 6、开始重装后,此处状态会显示为【重建中】,等到状态变回【运行中】,即可将节点重新加入资源池
6、开始重装后,此处状态会显示为【重建中】,等到状态变回【运行中】,即可将节点重新加入资源池

1.5.3 节点重新加入资源池
1、回到百舸资源池,节点管理界面,点击添加节点按钮,进入添加节点页面
 2、点击【使用已有服务器】,通过实例ID,找到我们刚刚重装的机器(有时实例不在【云服务器BCC】选项卡中,可以尝试【弹性裸金属服务器EBC/裸金属服务器BBC/高性能应用服务HPAS】这几个选项卡都找一下有没有)
2、点击【使用已有服务器】,通过实例ID,找到我们刚刚重装的机器(有时实例不在【云服务器BCC】选项卡中,可以尝试【弹性裸金属服务器EBC/裸金属服务器BBC/高性能应用服务HPAS】这几个选项卡都找一下有没有)
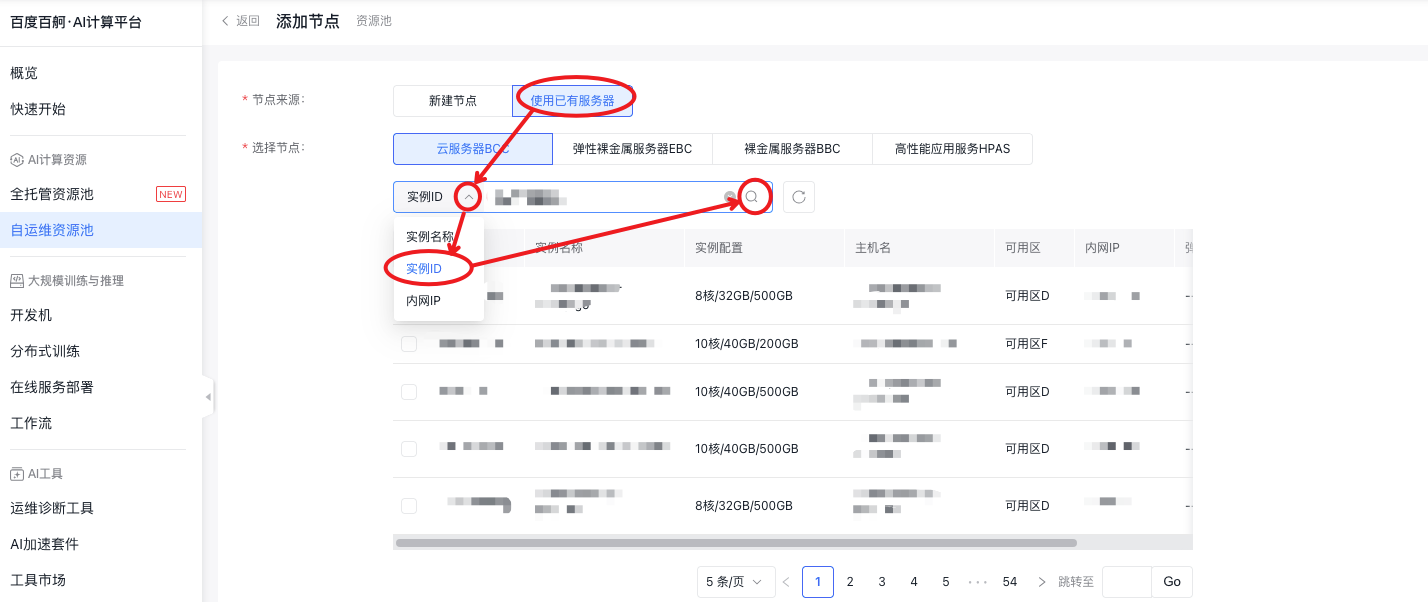 3、注意选择【使用已有配置】,不要再重装操作系统以免覆盖掉我们刚才选择的显卡驱动,输入刚才重装时设置的root密码,点击完成,开始加入
3、注意选择【使用已有配置】,不要再重装操作系统以免覆盖掉我们刚才选择的显卡驱动,输入刚才重装时设置的root密码,点击完成,开始加入
 4、等待节点加入完成,状态为未干预,且可用,即可开始使用
4、等待节点加入完成,状态为未干预,且可用,即可开始使用

2. 启动客户端
2.1 启动vnc远程桌面
2.1.1 启动vnc服务端
在Terminal界面内输入以下命令,开启vnc服务
1# 镜像中TurboVNC服务器,可以使用以下命令设置或修改密码(会被提示可以设置一个 view-only 密码,可以跳过);
2# 如果不在这一步设置一个密码,在实际启动vncserver的时候就会被要求现设置密码
3# /opt/TurboVNC/bin/vncpasswd ~/.vnc/passwd
4
5# 如果之前没有设置过turboVNC的密码,这里会要求设置密码和只读密码(当前先不设置只读密码)例如密码: aihclite,建议只读
6# /opt/TurboVNC/bin/vncserver :1 -geometry 1920x1080 -depth 24 #参数1 会默认选择端口5901
7
8# 每次在停止开发机之前,都要用这个命令关闭vnc服务端
9# 如果没有关闭,则下次开机再想启动vnc服务,就会碰上【/tmp/.X1-lock】和【/tmp/.X11-unix/X1】两个文件锁,需要删除了文件锁之后才能再次开启vnc服务端
10# /opt/TurboVNC/bin/vncserver -kill :1
11
12# 使用下面的脚本启动vnc客户端,客户端会自动清理锁文件
13# 但如果:1已经在运行一个vnc服务,那么脚本会提示【A VNC server is already running as :1】并退出,不做任何事情
14~/workspace/vncstart.sh
15# 如果希望修改启动参数,例如修改默认分辨率为1024*768,或者将24色修改为16色,则可以在【/opt/TurboVNC/bin/vncserver -kill :1】关掉之前的vnc服务之后,使用下面带参数的命令重新启动vnc服务
16# ~/workspace/vncstart.sh -geometry 1024*768 -depth 16初次开启vnc服务,会要求输入密码(密码限制了8位长度),以及选择是否添加只读密码
按以下操作完成密码设置,建议不添加只读密码(建议选n)
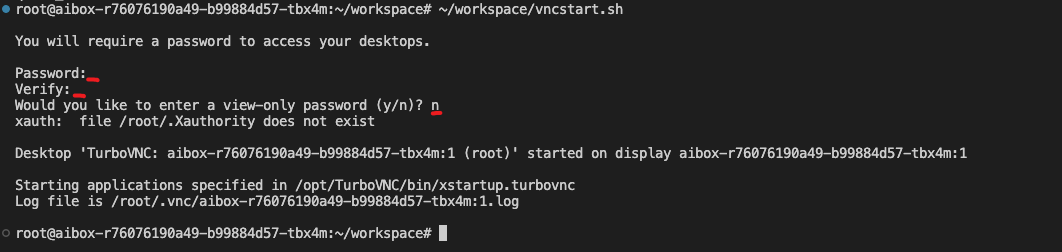
这个步骤完成后,vnc远程桌面就会在开发机的5901端口等待响应
为安全等考量,不建议将5901直接公开到外网上,下面会演示如何通过ssh将端口投射到本地,然后通过本地连接远程桌面
2.1.2 使用本地ssh将开发机的5901端口投射到本地
本地(Windows或Mac)命令行启动ssh作为转发通道(在使用vnc期间,命令行的ssh需要持续开启):
1# 用本地环境的命令行执行这个ssh,-L是将开发机的5901监听连接到本地,后面的root、ip和-p部分根据实际开发机给出的公网访问命令执行
2ssh -L 5901:127.0.0.1:5901 root@开发机公网IP地址 -p 开发机公网端口(可在开发机详情页复制)开发机详情页公网IP和公网端口位置(在创建开发机时,选择开启ssh,并选择一个能连上公网的BLB,才能看到下面的部分):

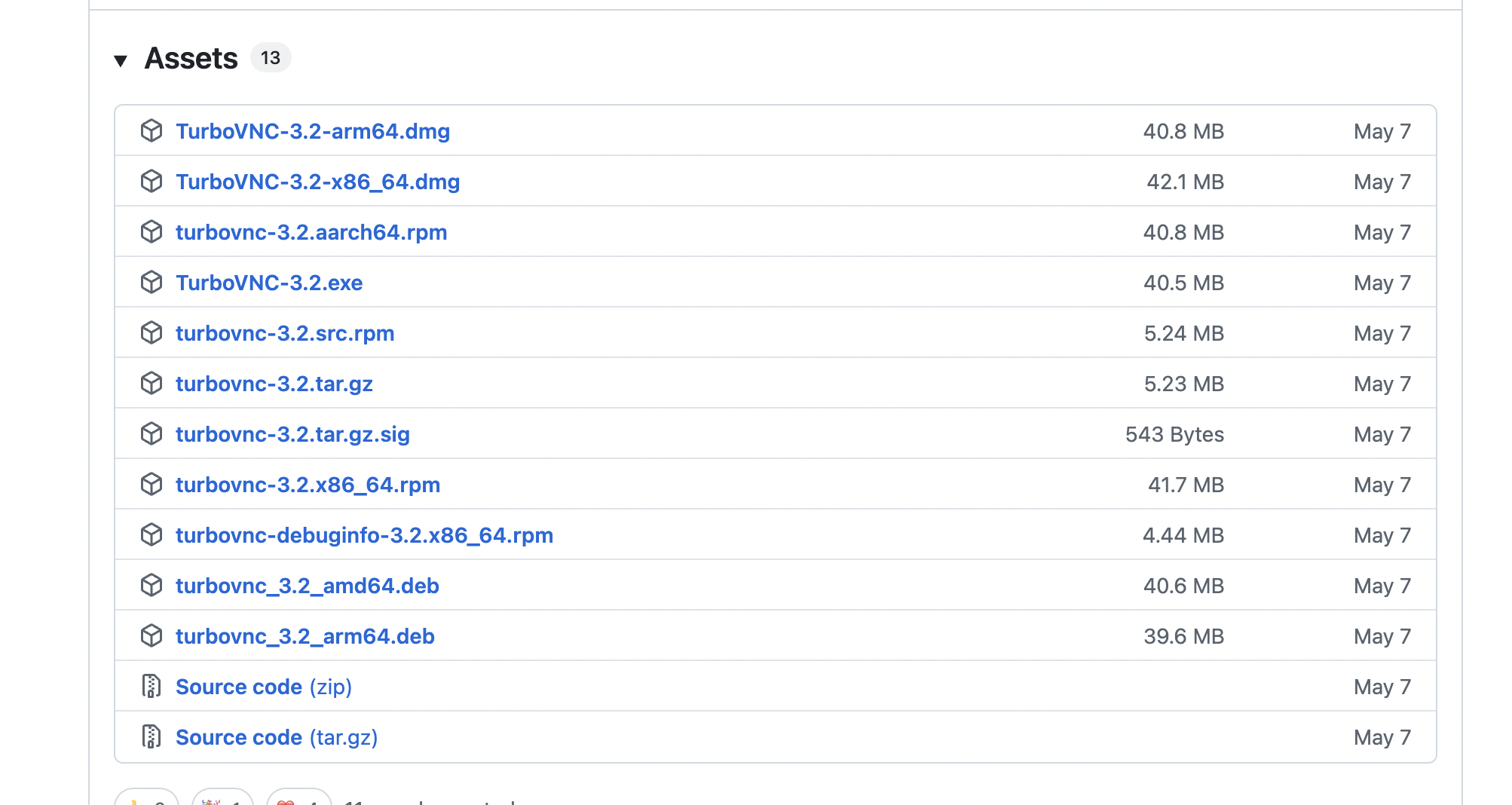
2.1.3 下载TurboVNC客户端到本地并安装,并链接vnc服务
TurboVNC客户端下载地址: https://github.com/TurboVNC/turbovnc/releases 找到相应版本(建议选择3.2版本),点击展开版本卡片最下方的Assets链接,可以看到各OS下载地址。当前版本TurboVNC Viewer v3.2 (20250506)。
 下载安装完成后,会有两个快捷图标,点击如下图标:
下载安装完成后,会有两个快捷图标,点击如下图标:

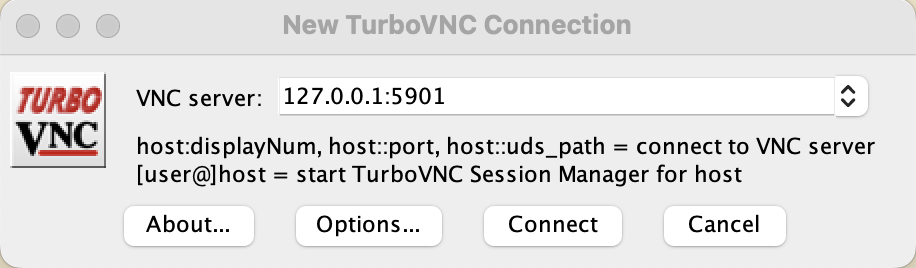
点击启动后,点击connect进行远程连接:
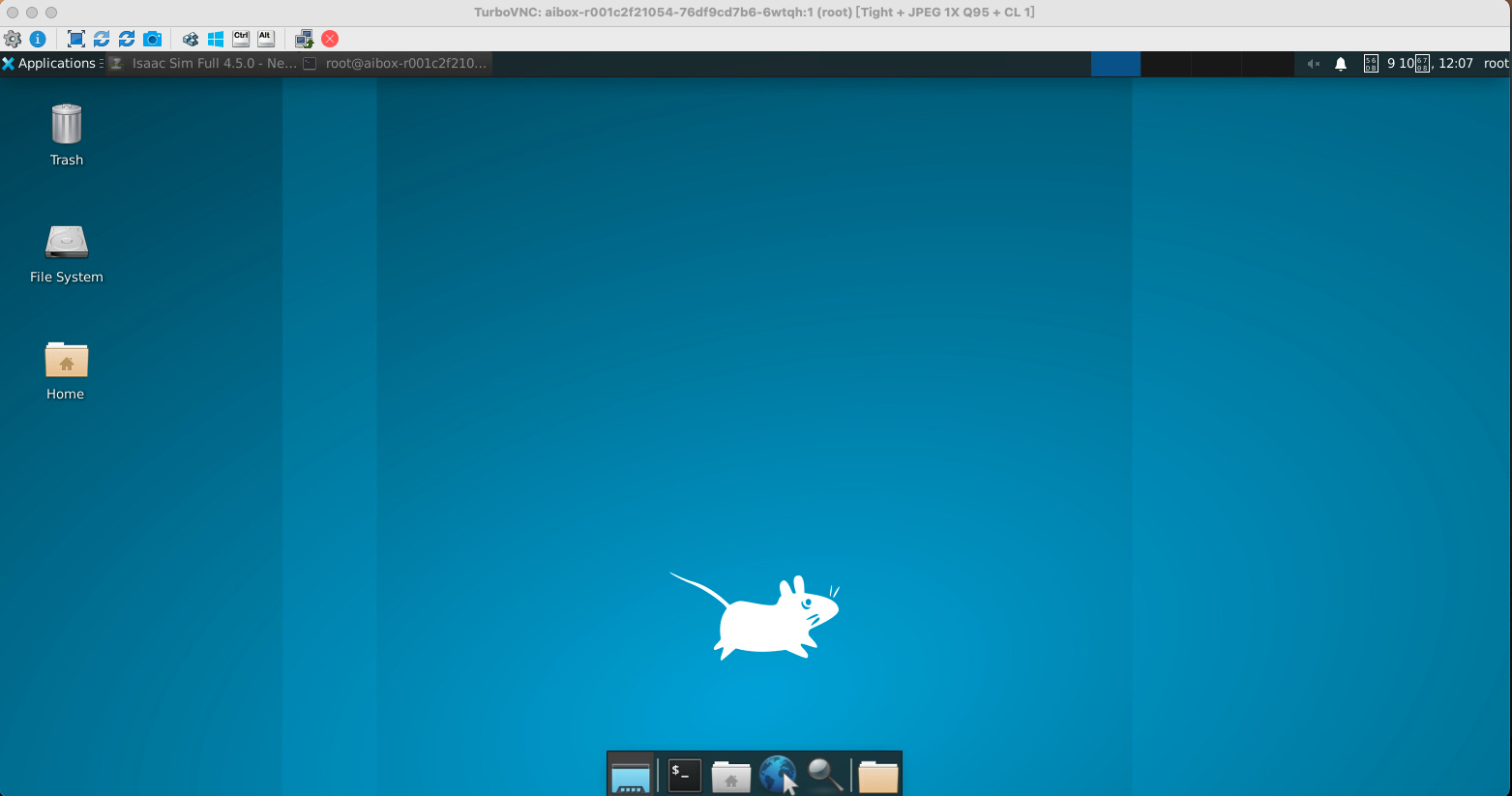
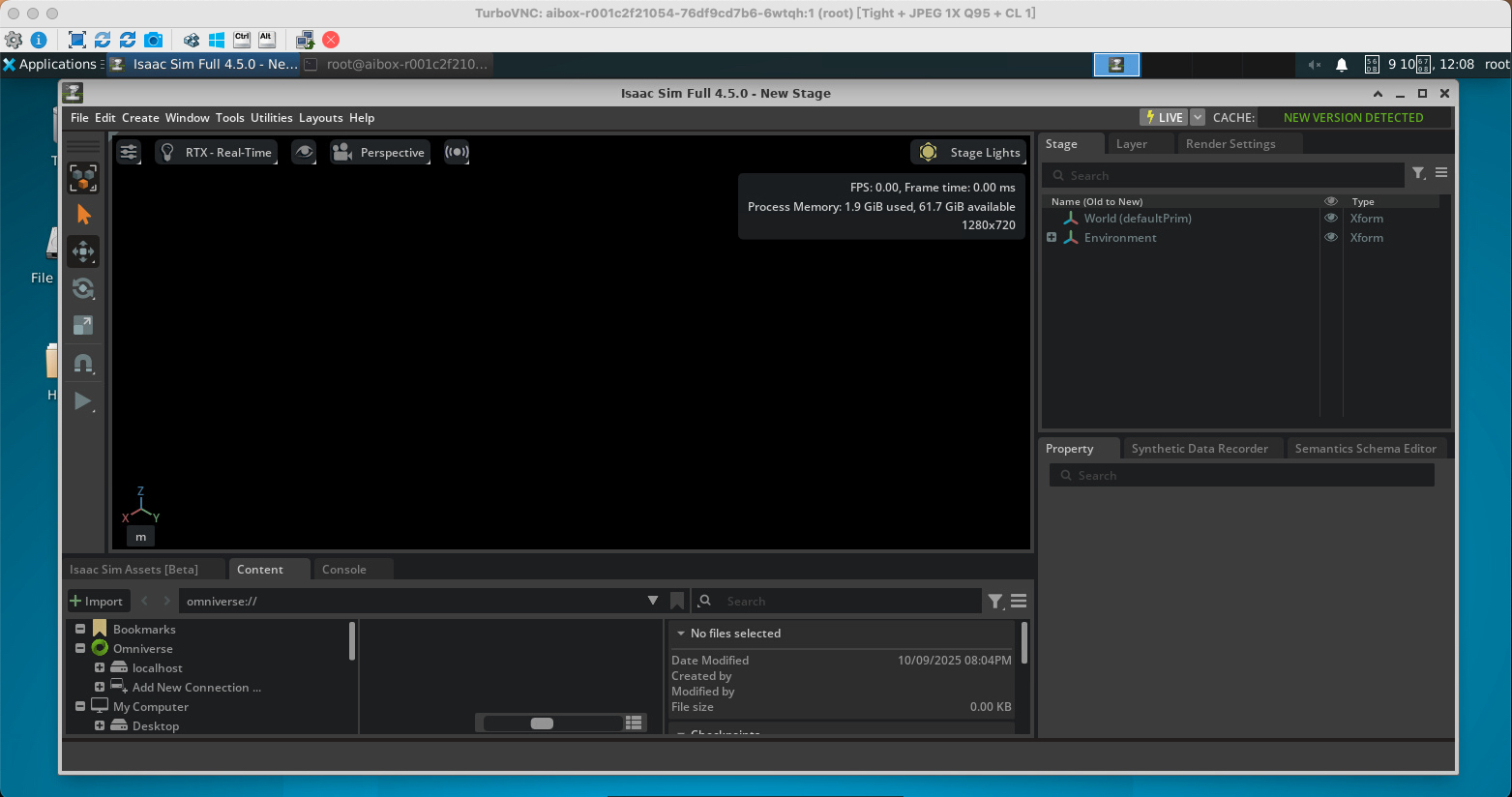
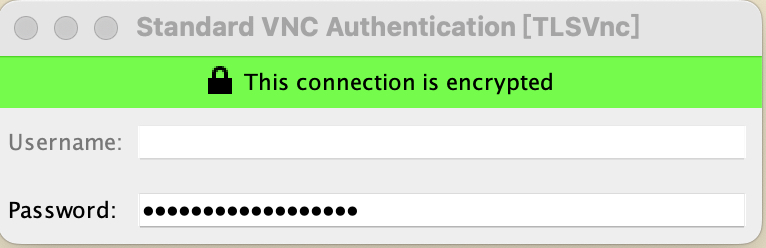 连接成功后:
连接成功后:
2.2 启动isaac-sim客户端
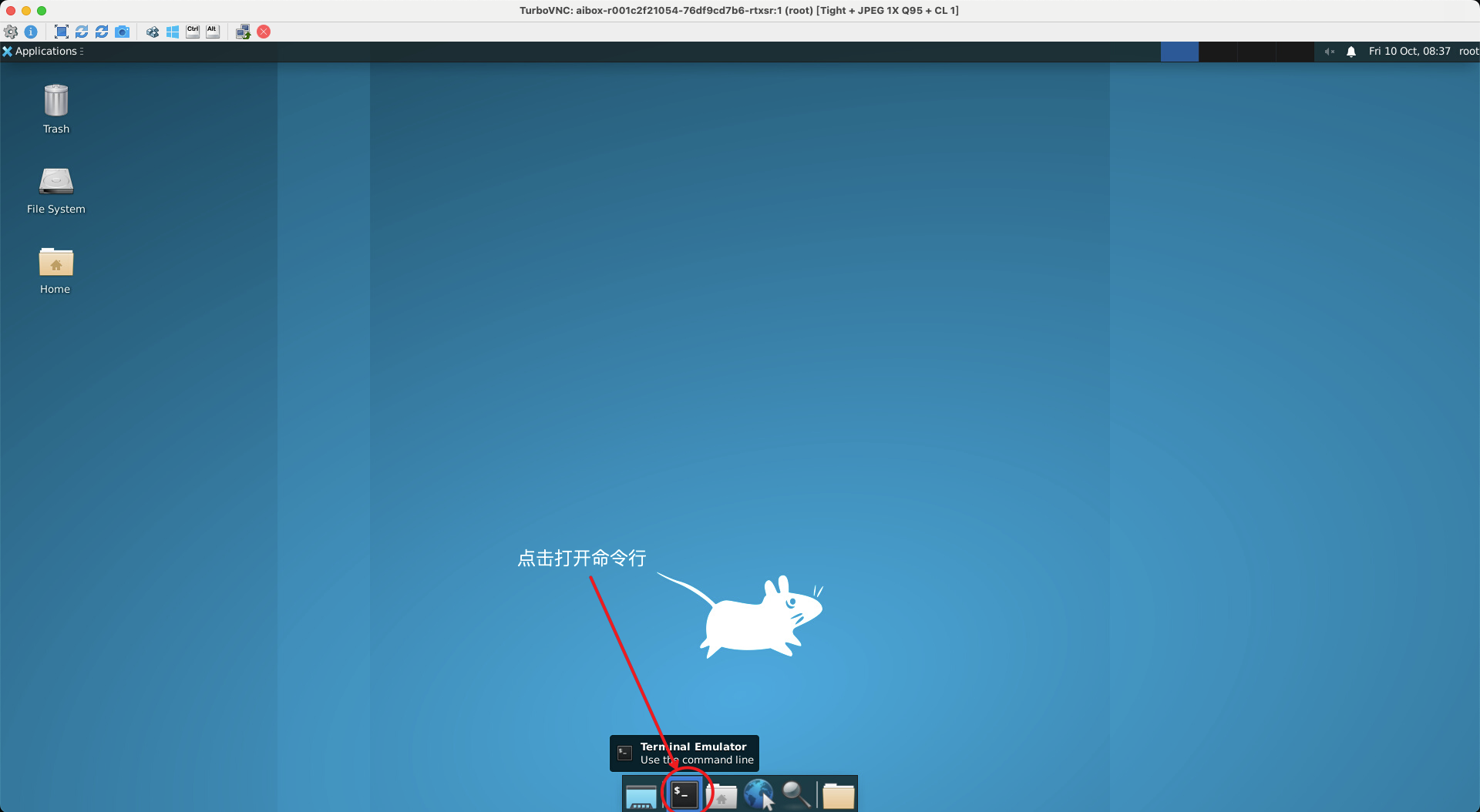
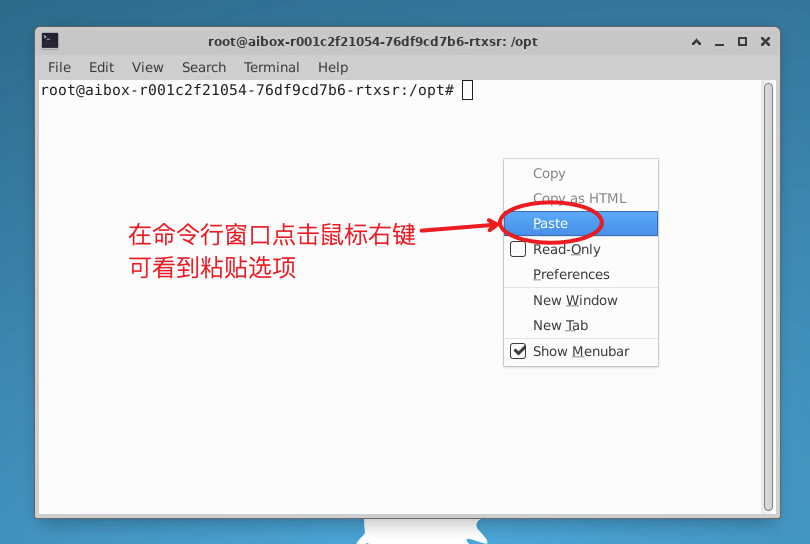
在上面已经打开的vnc界面中,执行如下操作,从命令行启动isaac-sim客户端IsaacSim可视化界面:
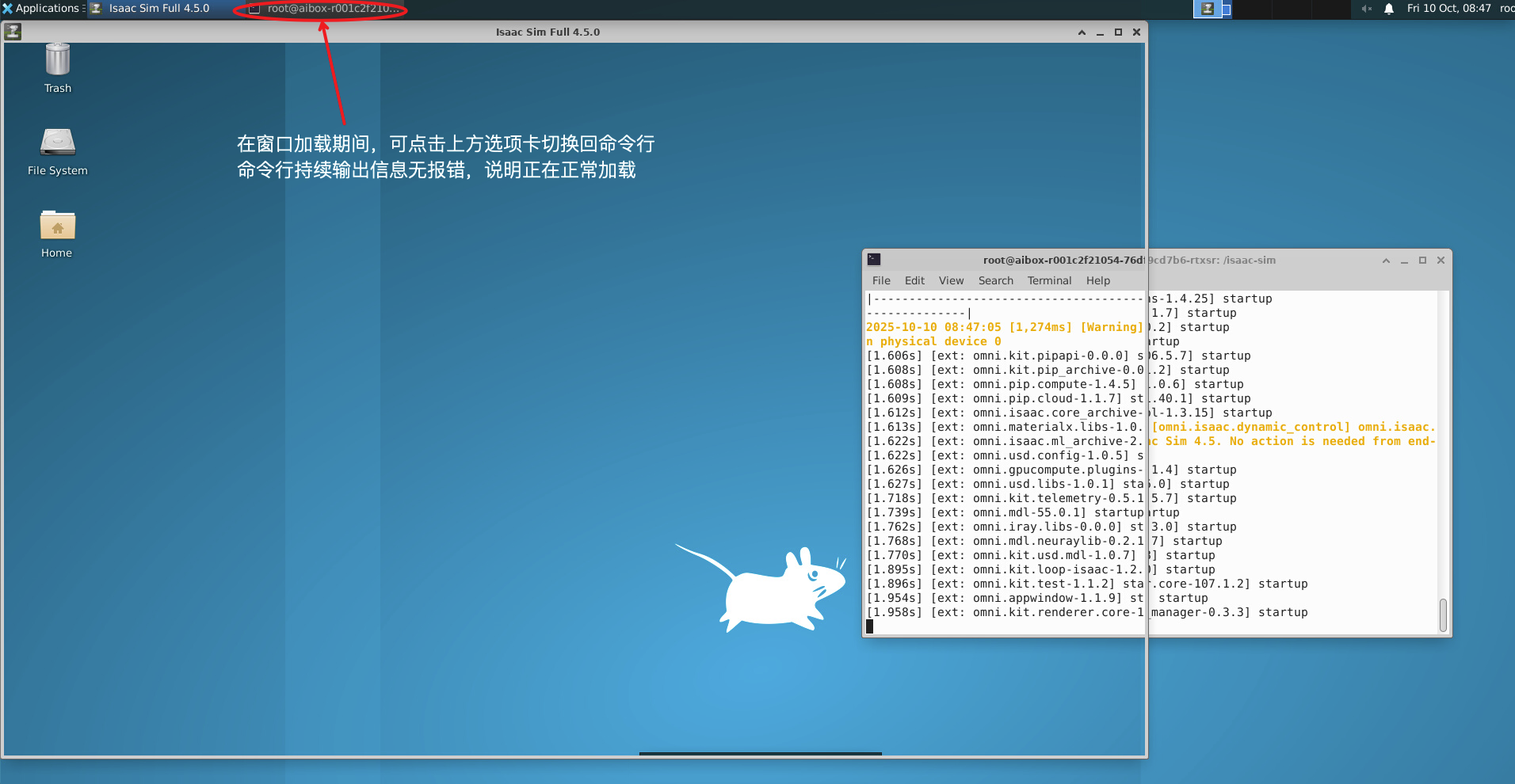
可视化界面为先出现窗口边框,加载过程结束后再出现窗口内容,创建开发机第一次加载可能会需要几分钟(下载一些服务依赖),之后再启动一般需要十秒左右。另外,IsaacSim在初始化和使用过程中可能会访问外网,建议设置HTTP和HTTPS网络代理
1# 先设置网络代理,再启动isaac-sim服务
2/isaac-sim/isaac-sim.sh --allow-root请使用nvidia-smi命令查看显卡驱动版本,如显卡驱动版本为535.261.03则建议使用
1# 先设置网络代理,再启动isaac-sim服务
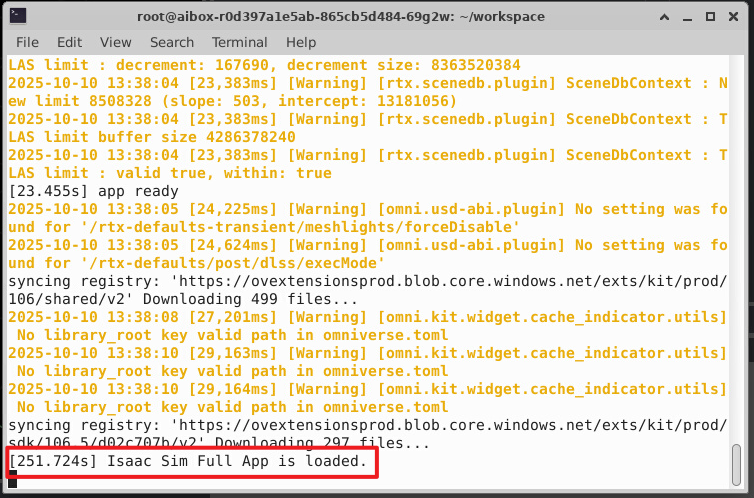
2/isaac-sim/isaac-sim.sh --allow-root --/rtx/verifyDriverVersion/enabled=false启动结果:
命令行出现红框内字样,说明启动成功
3. 案例演示
3.1 执行官方四足和人形可操作演示
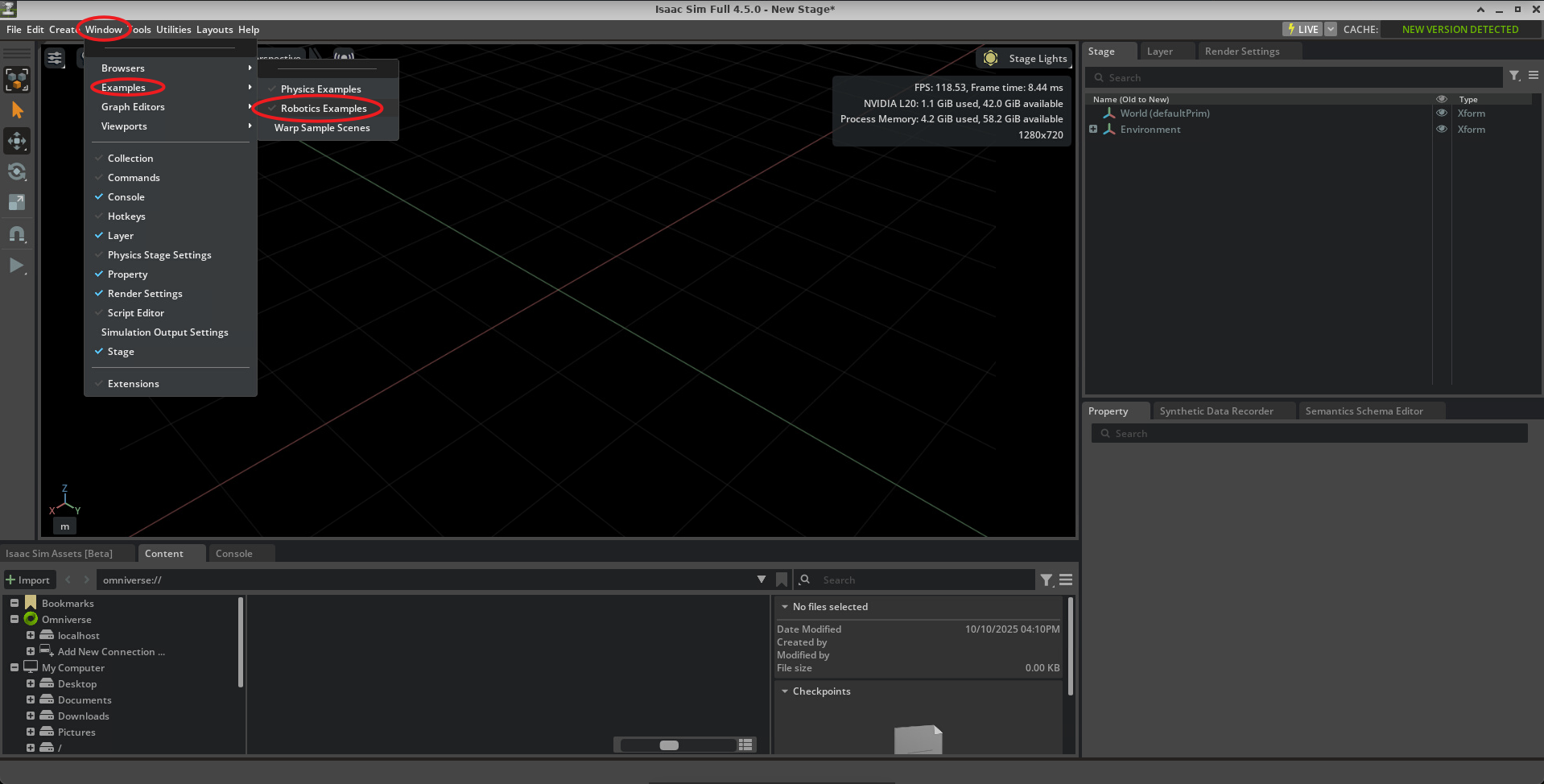
3.1.1 步骤一:开启机器人案例选项卡
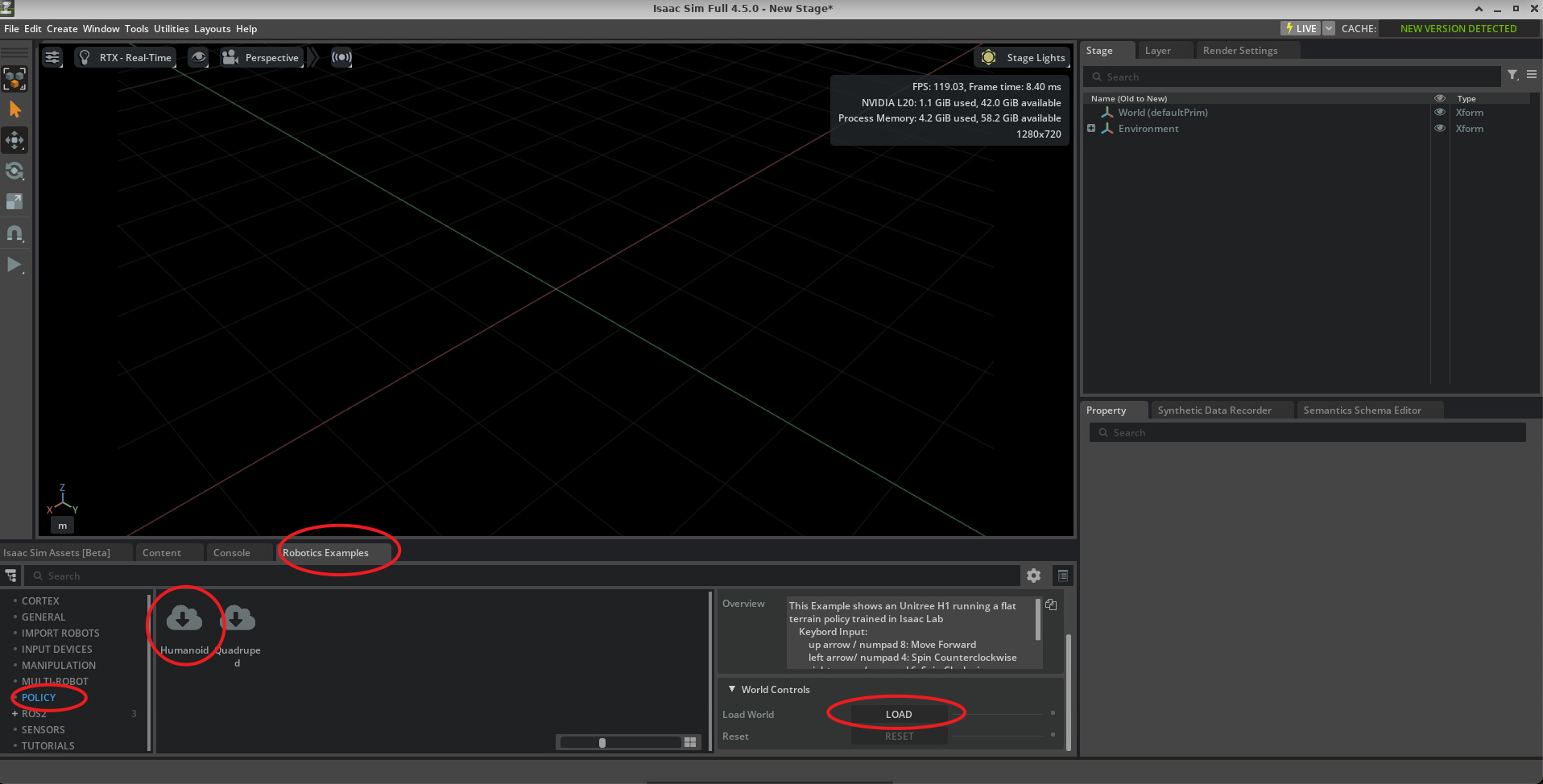
3.1.2 步骤二:加载Humanoid人形机器人案例
点击Load按钮加载,Reset按钮重置案例(或选择右侧的Quadruped四足机器人案例,也是点击Load按钮加载,Reset按钮重置案例)
 一般来说,对一个模型或者脚本点击Load按钮,客户端窗口会停止响应一些时间进行网络加载
一般来说,对一个模型或者脚本点击Load按钮,客户端窗口会停止响应一些时间进行网络加载
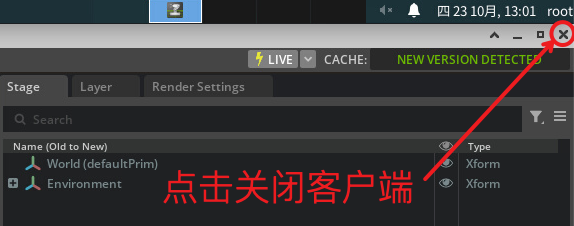
但在开发机刚新建时,这里的加载时间过长,也有几率是客户端卡死
如果客户端卡死,则可以点击右上角的x关闭客户端后,在命令行再次执行命令启动,一般一到两次之后,一旦有一次Load成功,之后客户端就不会再卡死
3.1.3 步骤三:操作机器人
窗口缩放操作:
- 在窗口内使用鼠标滚轮
Humanoid人形机器人操作:
- 前进:向上箭头/数字键 8
- 左转:左箭头/数字 4
- 右转:右箭头/数字 6
Quadruped四足机器人操作:
- 前进:向上箭头/数字键 8
- 后退:后退箭头/数字 2
- 向左移动:左箭头/数字 4
- 向右移动:右箭头/数字键 6
- 左转:N / NUM 7
- 右转:M / NUM 9
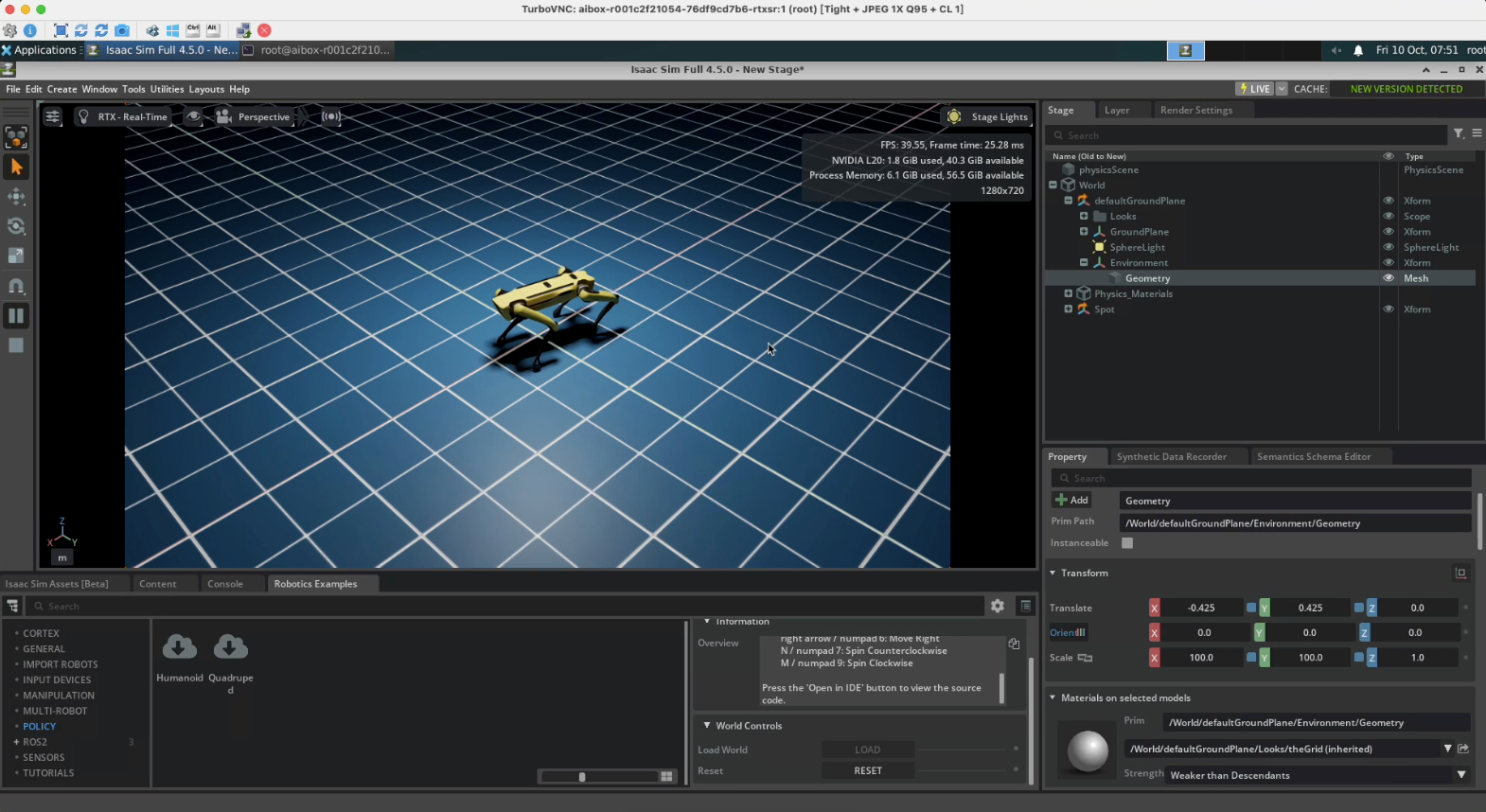
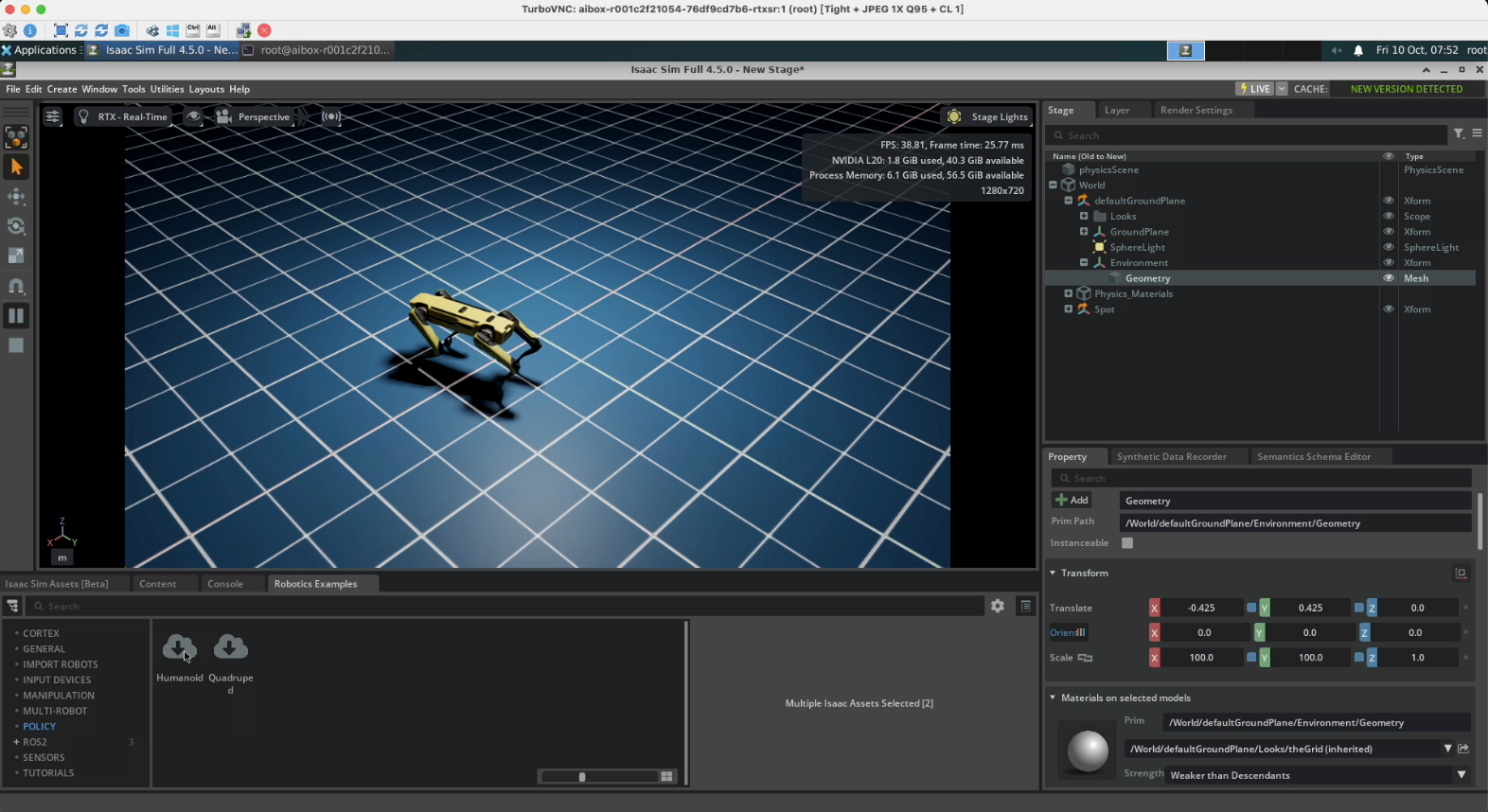
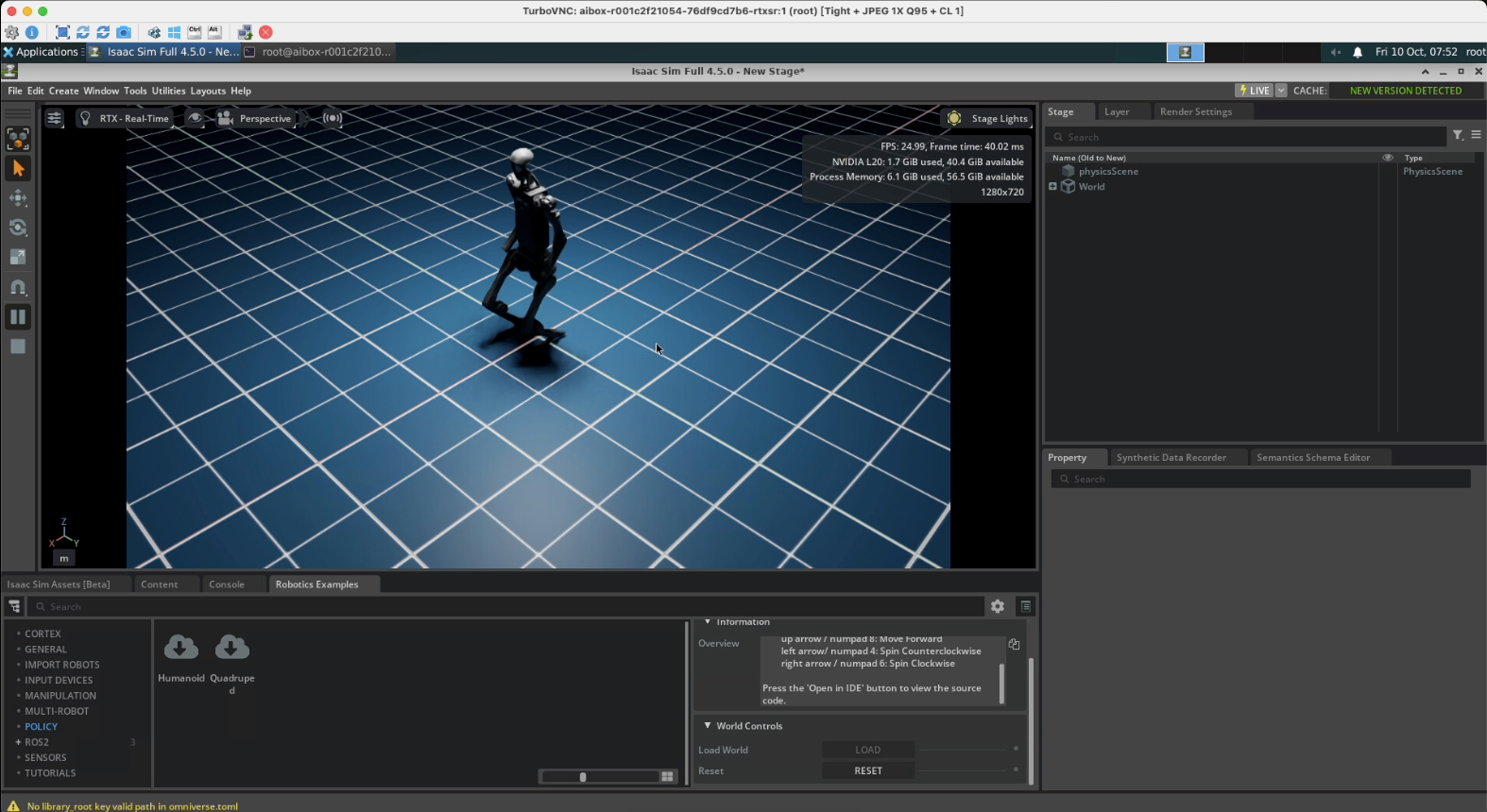
3.1.4 运行效果图片&视频
3.2 宇树GR1机器人简易操作演示
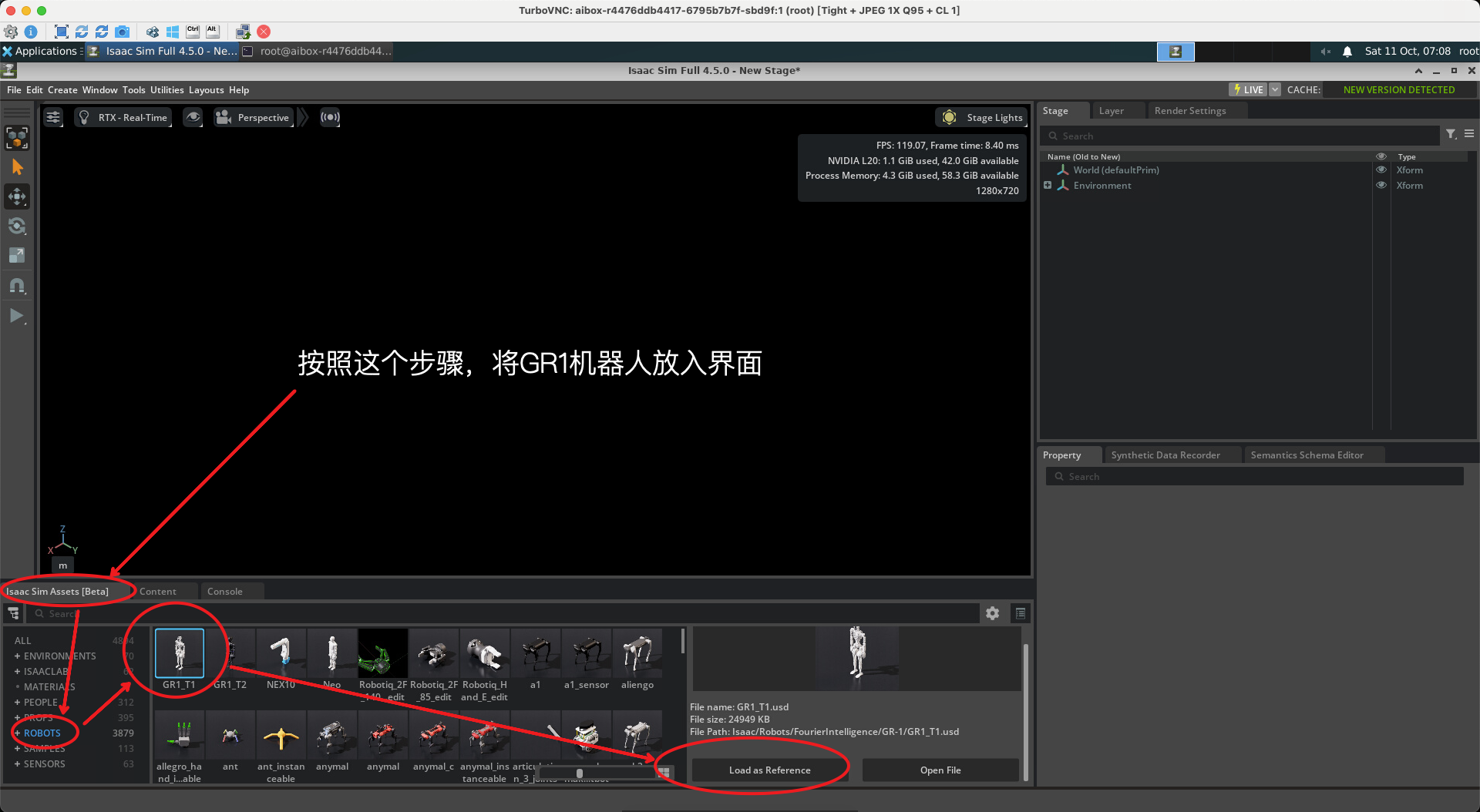
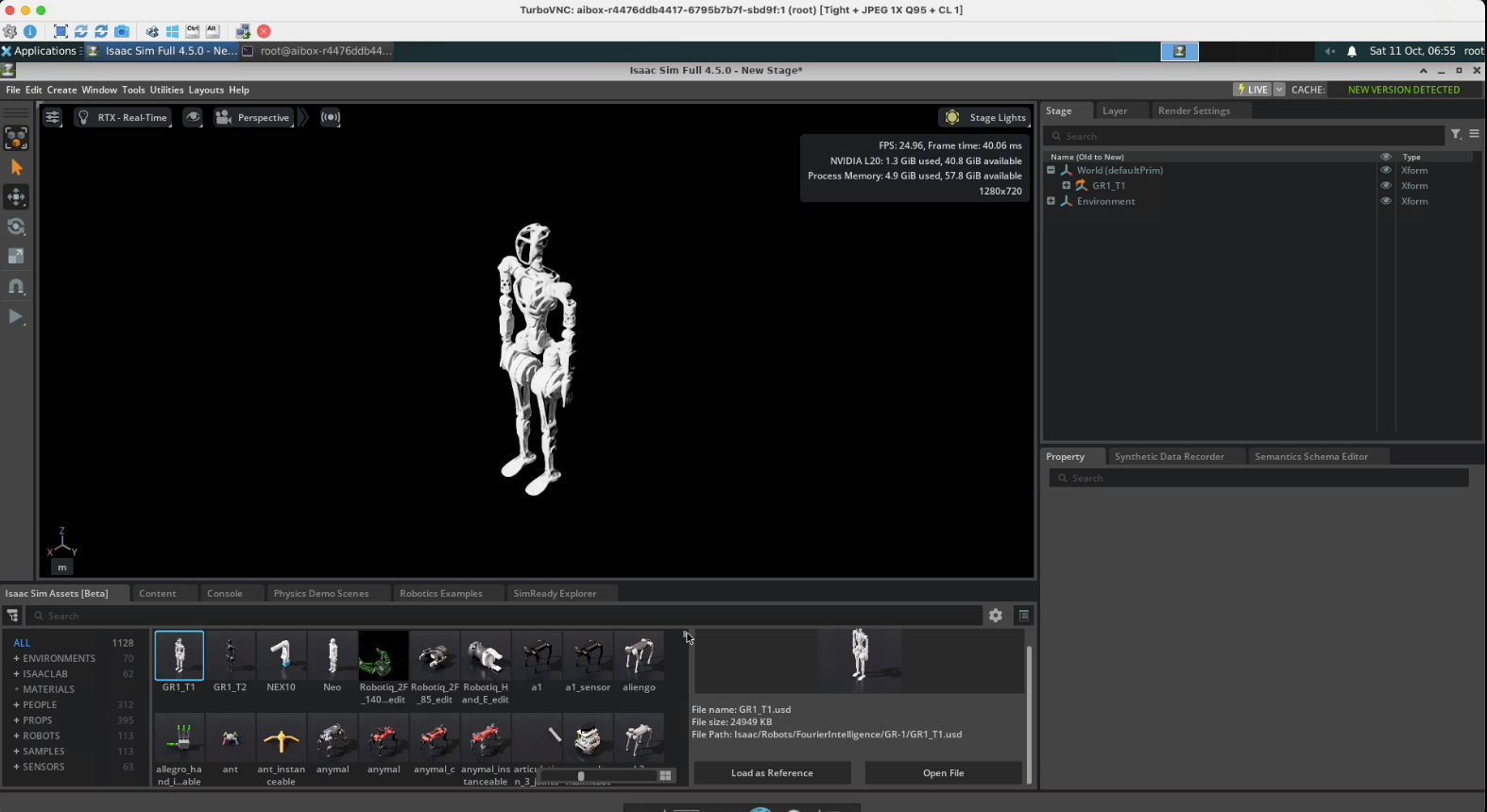
3.2.1 步骤一: 在Assets中找到GR1机器人,并加载到工作空间中
操作步骤:
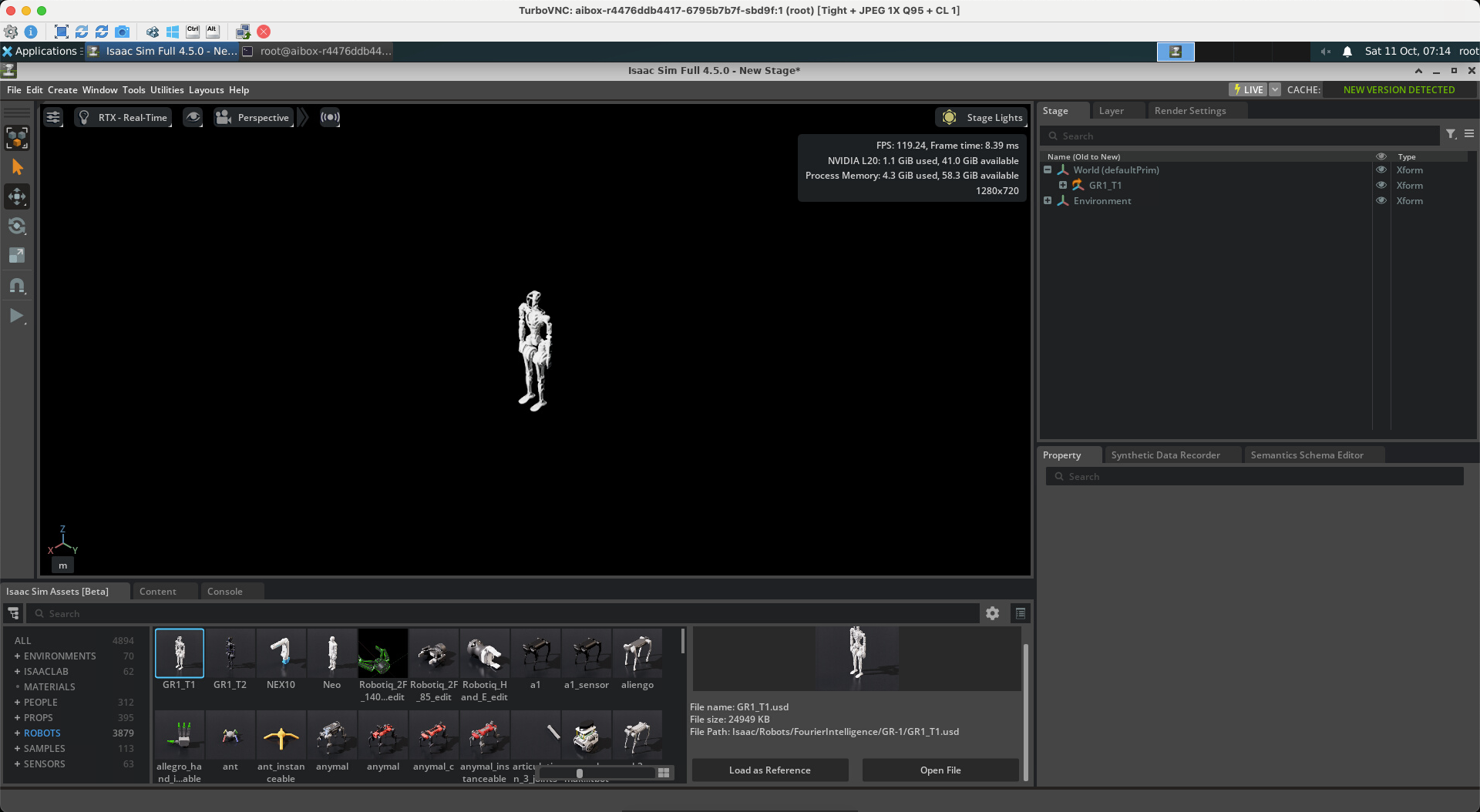
 操作结果:
操作结果:
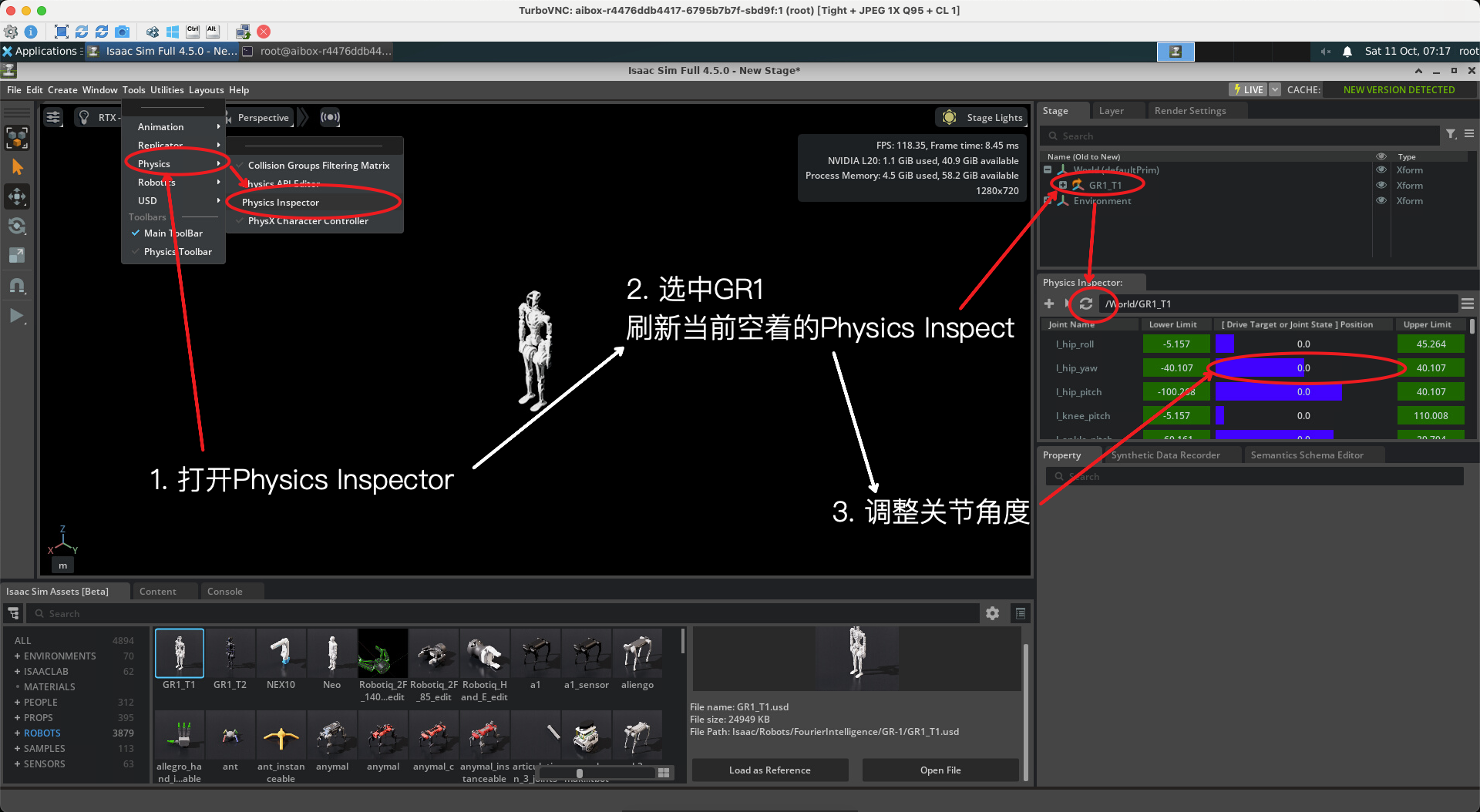
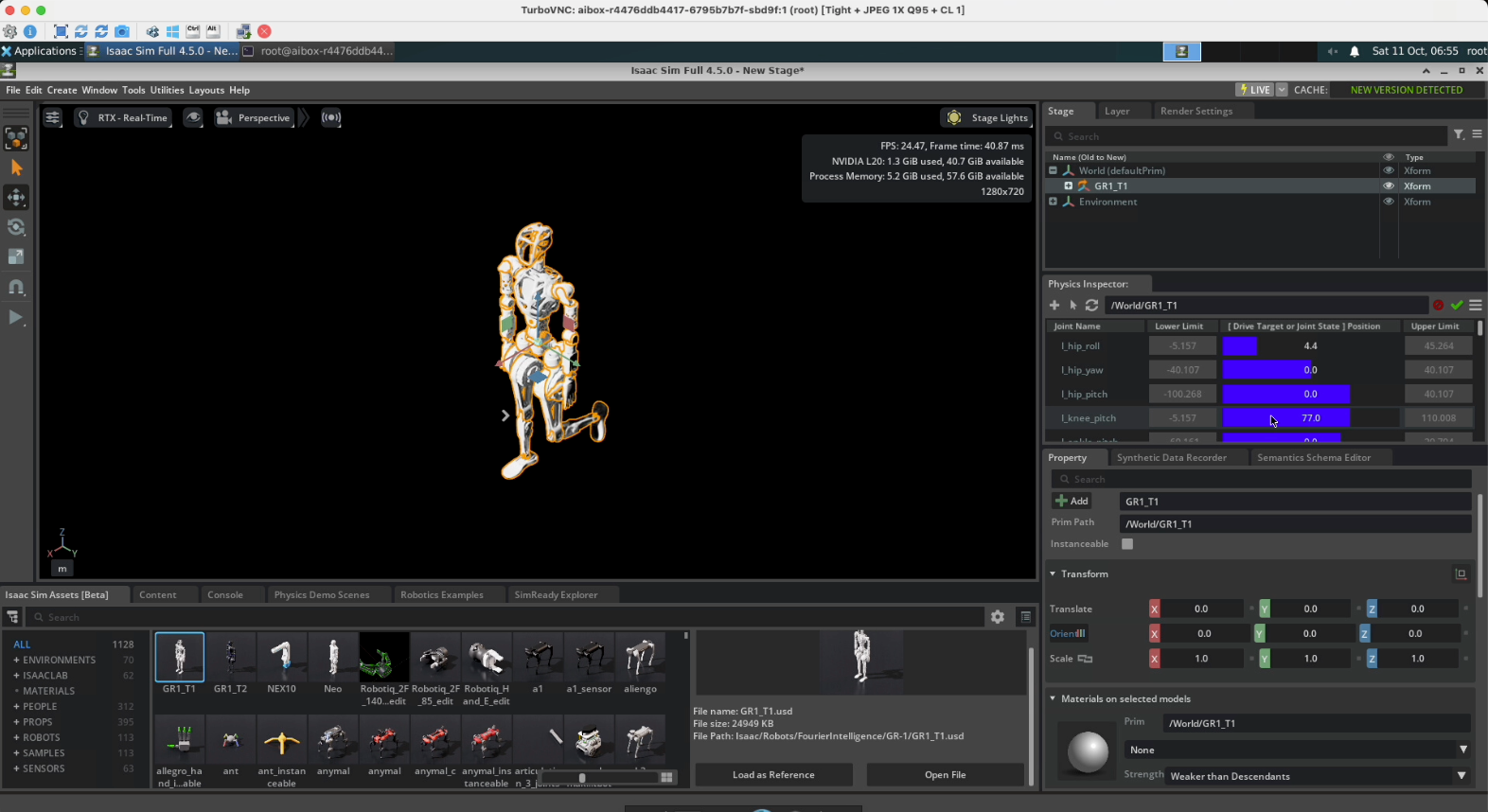
3.2.2 步骤二: 使用Physics Inspector工具,对关节进行简易操作
操作步骤:
 额外步骤:
额外步骤:
如果按照上面操作后,Physics Inspector显示成下面的样子,则需要点击一下【Re-Enable authoring】按钮,就会显示关节角度界面
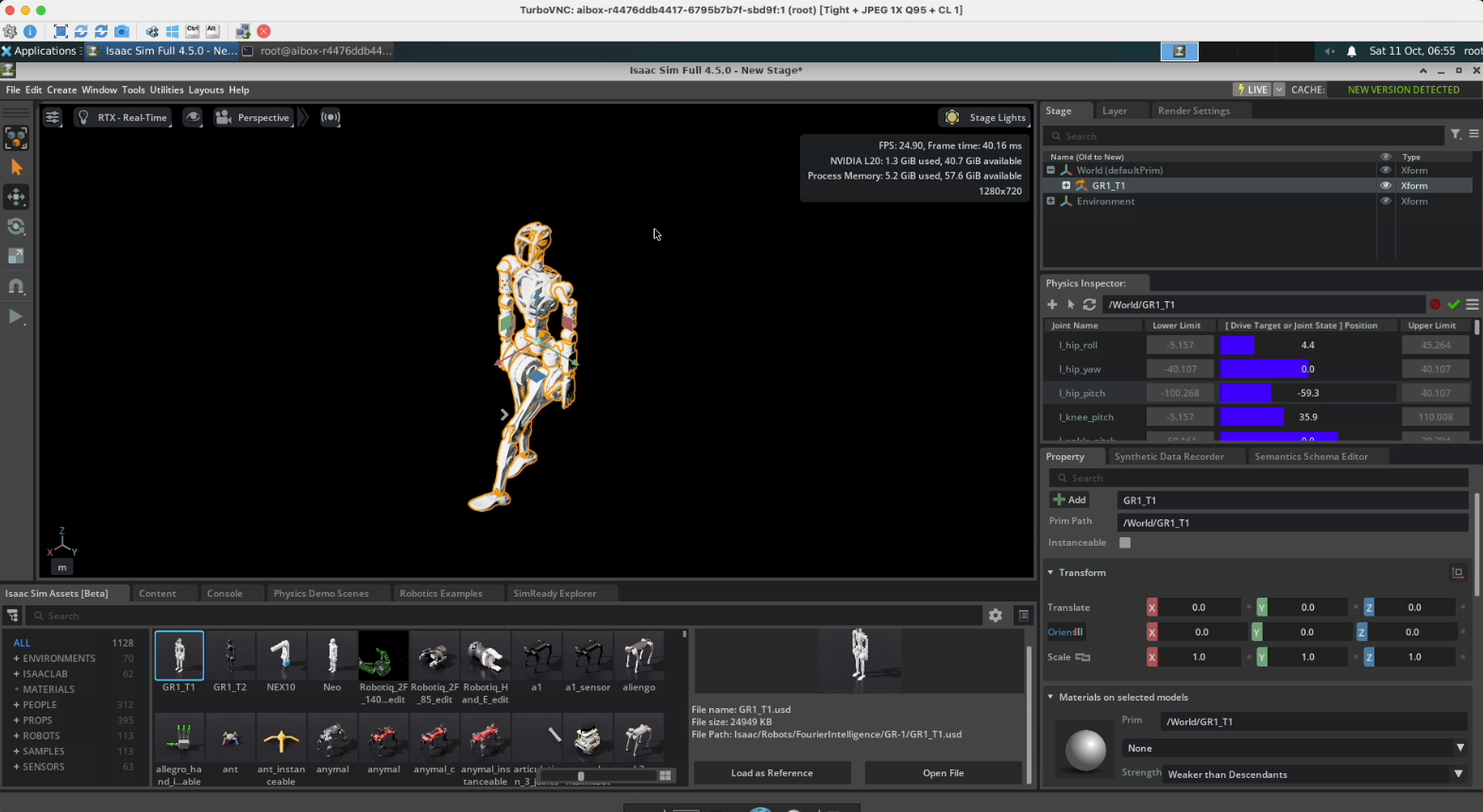
 操作结果图片&视频:
操作结果图片&视频:
评价此篇文章