
Isaac Sim 可视化
案例介绍
NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,本文是在开发机上基于isaac sim实现可视化能力的实践教程
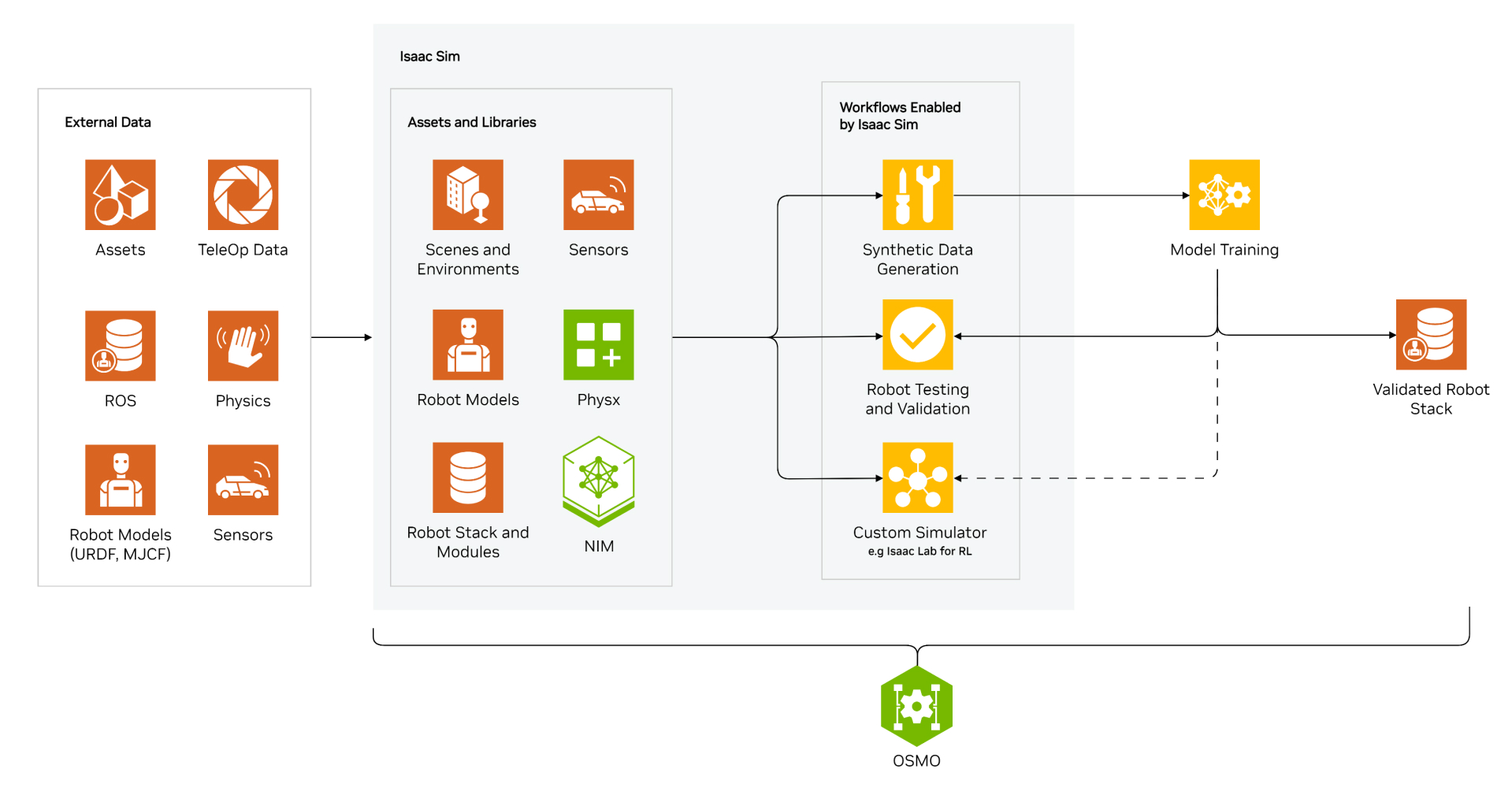 NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,支持从URDF、MJCF和CAD等常见格式导入机器人系统。通过GPU加速物理引擎来实现精确仿真,并支持大规模、多传感器RTX渲染。集成数据生成、强化学习、ROS集成和数字孪生模拟等端到端工作流程。其优势包括:
NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,支持从URDF、MJCF和CAD等常见格式导入机器人系统。通过GPU加速物理引擎来实现精确仿真,并支持大规模、多传感器RTX渲染。集成数据生成、强化学习、ROS集成和数字孪生模拟等端到端工作流程。其优势包括:
- 资产导入&导出:支持从非USD格式导入机器人和环境,或将其导出为非USD格式;
- 机器人微调:优化机器人的物理精度、计算效率或真实感;
- 机器人仿真:提供全流程运动控制工具链,如控制器、运动生成和运动学求解器以及策略集成接口;
- 传感器系统:支持RTX和物理学传感器。
官方地址:
https://docs.isaacsim.omniverse.nvidia.com/4.5.0/index.html
部署方案
目前百舸平台提供了两种Isaac sim可视化的方案:
- 基于 RDP 远程桌面的部署方式:支持密码鉴权,通用性较高。
- NV 官方 webviewer可视化方案:基于 WebRTC协议,性能较好,不支持鉴权(推荐配合云的安全组使用)
选型建议:如果仅使用 Isaac sim 软件,推荐 webviewer 方式,性能较好;如果还有一些其他可视化操作的需求,可以使用 RDP 方式;也可以组合使用,如用户通过 webviewer 的方式使用 Isaac sim,也可以再启动 RDP桌面 进行一些其他可视化的操作
- 不推荐使用两种方式同时启动 Isaac sim
- webview 方式仅支持 Isaac sim 5.0 版本,不支持 4.5 版本
部署环境要求
| 部署要求 | 最佳实践 | |
|---|---|---|
| CPU | 建议8核及以上 | 按需 |
| 内存 | 建议64G及以上 | 按需 |
| GPU | Isaac Sim : L20等 支持RT Core的NVIDIA GPU卡 1卡及以上 | 按需 |
| CDS | 按需 | 按需 |
| 其它 | 无 | 无 |
使用需知:
- Isaac Sim 的仿真渲染依赖DLSS(超采样技术,Deep Learning Super Sampling),因此推荐使用GeForce RTX系列显卡
- 本案例使用L20等Ada Lovelace架构三代RT Core的显卡,且使用的BLB网络带宽为50Mbps时,无噪点,无卡顿,表现更为符合期望
- isacc官方要求,显卡驱动版本需要高于535.129 ,如果Ubuntu版本>=22.04.5 kernel 6.8.0-48-generic,则驱动至少要求在535.216.01以上
- 535驱动版本中(550无此问题),含535.255及以上的驱动版本,存在一个已知的显卡驱动判断错误,需要添加--/rtx/verifyDriverVersion/enabled=false参数,跳过显卡驱动判断(操作方式见后续步骤)
- 官方未对cuda和cudnn有限制,不同的cuda版本和cudnn版本是否对可视化界面的表现有影响未验证
- 由于该工具的较多场景需要访问外网,可以通过设置服务网卡,并设置HTTPS网络代理支持访问。服务网卡的配置参考
- 建议在距离您最近的地域创建开发机实例使用当前方案。如果远程桌面不流畅,建议配置 RDP 比特率为16位
使用说明
本文会先介绍如何【启动可视化客户端】,然后以【执行官方四足和人形可操作演示】、【宇树GR1机器人简易操作演示】两个例子,简单介绍Isaac Sim的使用。
在试用案例之前,请确保已挂载了案例所需的数据集,否则脚本无法正常运行,可在脚本内更改数据集地址配置
1. 创建与登录开发机
1.1 从快速开始创建一个【Isaac Sim可视化】开发机实例

点击在开发机中打开,创建开发机,主要配置如下:
-
基本信息
- 版本选择:支持 Isaac Sim 5.0 和 4.5 版本
-
资源配置:
- GPU选择: 建议使用 NVIDIA L20
- CPU/内存:推荐8核64G及以上,保证运行所需的基础资源配置
- 启动自定义端口,选择支持公网访问的BLB(建议选择网络带宽≥50Mbps的BLB,带宽越大越好,越少共享复用越好)
-
新增访问端口,具体如下:
服务名称 开发机监听端口 BLB 监听端口 传输协议 用途 rdp 3389(固定) 随机分配即可 TCP RDP 启动必需 streaming-udp 随机分配,需要与BLB 监听端口一致 随机分配,需要与开发机监听端口一致 UDP 需要保证开发机监听端口和BLB 监听端口一致,随机分配即可
webviewer必需streaming-tcp 49100(固定) 随机分配即可 TCP webviewer 必需 webviewver 8080(固定) 随机分配即可 TCP webviewer 必需
Isaac sim 4.5 版本仅支持 RDP 的方式启动,不支持 Webviewer 方式,无需设置streaming-udp、streaming-tcp、webviewver服务
1.2 登录开发机
填写完表单,提交后,在开发机列表可见创建的开发机,等待资源调度并部署成功后,点击登录,即可进入开发机webIDE

主要路径介绍
- Isaac Sim USD资产挂载路径:/mnt/bos/isaac-sim,该目录下存有Isaac Sim预置的部分USD资产。
1.3 验证GPU硬件和显卡驱动版本
根据部署环境要求成功创建开发机后,点击登录开发机,进入开发机webIDE,打开Terminal界面:
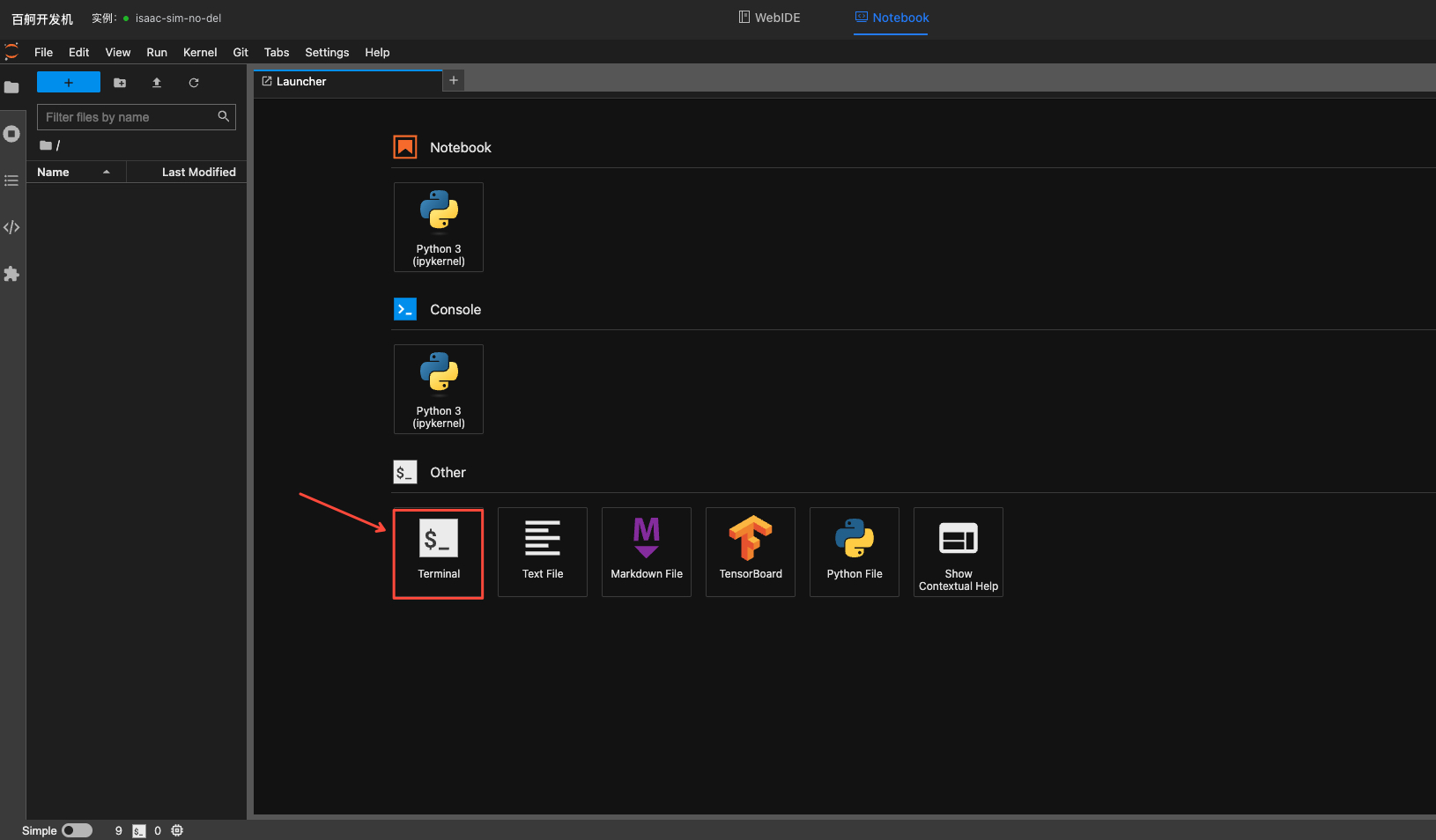 在打开的Terminal界面内输入以下命令,确认NVIDIA的GPU硬件和显卡驱动版本
在打开的Terminal界面内输入以下命令,确认NVIDIA的GPU硬件和显卡驱动版本
1nvidia-smi执行结果查看,红圈中是显卡驱动版本和GPU硬件型号
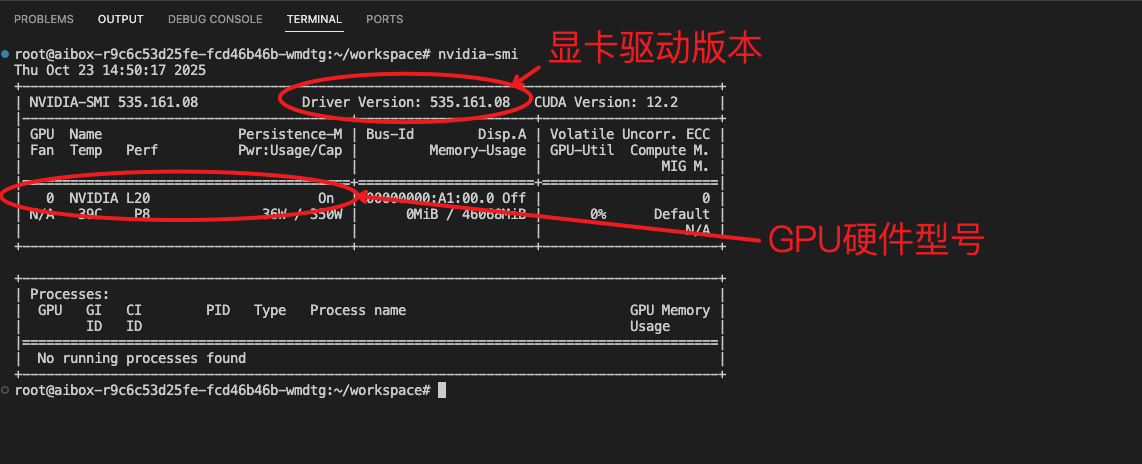
请参考我们下面提出的建议,选择驱动版本
- isacc官方要求,显卡驱动版本需要高于535.129 ,如果Ubuntu版本>=22.04.5 kernel 6.8.0-48-generic,则驱动至少要求在535.216.01以上
- 535驱动版本中(550无此问题),含535.255及以上的驱动版本,存在一个已知的显卡驱动判断错误,需要添加--/rtx/verifyDriverVersion/enabled=false参数,跳过显卡驱动判断(操作方式见后续步骤)
- 官方未对cuda和cudnn有限制,不同的cuda版本和cudnn版本是否对可视化界面的表现有影响未验证
如显卡驱动不符合建议,建议联系售后支持同学重装节点驱动
2. 通过 RDP 方式配置访问Isaac Sim环境
登录开发机,进入开发机webIDE,打开Terminal界面
2.1 安装并启动 RDP 服务
使用如下指令安装并启动 RDP 服务
1#!/bin/bash
2
3set -e
4
5echo "===== 1. 安装桌面环境和 xrdp ====="
6apt-get update
7apt-get install -y xfce4 xfce4-goodies xrdp dbus-x11 libvulkan1
8
9echo "===== 2. 配置 xrdp 使用 xfce4 ====="
10echo "xfce4-session" > ~/.xsession
11chmod +x ~/.xsession
12
13# 修改 startwm.sh 启动 xfce4
14if ! grep -q "startxfce4" /etc/xrdp/startwm.sh; then
15 sed -i 's|^test -x /etc/X11/Xsession.*|# &\nstartxfce4|' /etc/xrdp/startwm.sh
16fi
17
18echo "===== 3. 配置 Vulkan 环境变量 ====="
19# 写入 bashrc(确保 RDP 终端也能用 GPU Vulkan)
20grep -q "VK_ICD_FILENAMES" ~/.bashrc 2>/dev/null || {
21 echo 'export VK_ICD_FILENAMES=/etc/vulkan/icd.d/nvidia_icd.json' >> ~/.bashrc
22 echo 'export LD_LIBRARY_PATH=/usr/local/nvidia/lib64:$LD_LIBRARY_PATH' >> ~/.bashrc
23}
24
25echo "===== 4. 启动 xrdp 服务 ====="
26service dbus start 2>/dev/null || true
27service xrdp restart
28
29echo ""
30echo "===== RDP 配置完成 ====="
31echo ""
32echo "连接方式:"
33echo " 1. 打开 RDP 客户端(Windows: mstsc, macOS: Microsoft Remote Desktop)"
34echo " 2. 输入服务器 IP:3389"
35echo " 3. 用户名: root"
36echo ""
37
38# 检查是否设置了密码
39if ! passwd -S root 2>/dev/null | grep -q " P "; then
40 echo "[提示] 请设置 root 密码用于 RDP 登录:"
41 echo " passwd root"
42 echo ""
43fi2.2 设置RDP远程桌面登陆的账号密码
使用如下指令配置密码
1passwd root2.3 通过桌面客户端访问
在本地电脑或者需要连接开发机Isaac SIm环境的电脑。
2.3.1 MAC/Windows远程桌面
从app store安装Windows App。
本次安装后,
- 在Windows APP 中依次点击右上角的**加号** 和 **添加电脑** 菜单,新建远程连接
- 将从开发机复制的 RDP 的公网地址加端口(公网地址可从开发机详情页的自定义端口配置区域获取)输入到访问地址栏

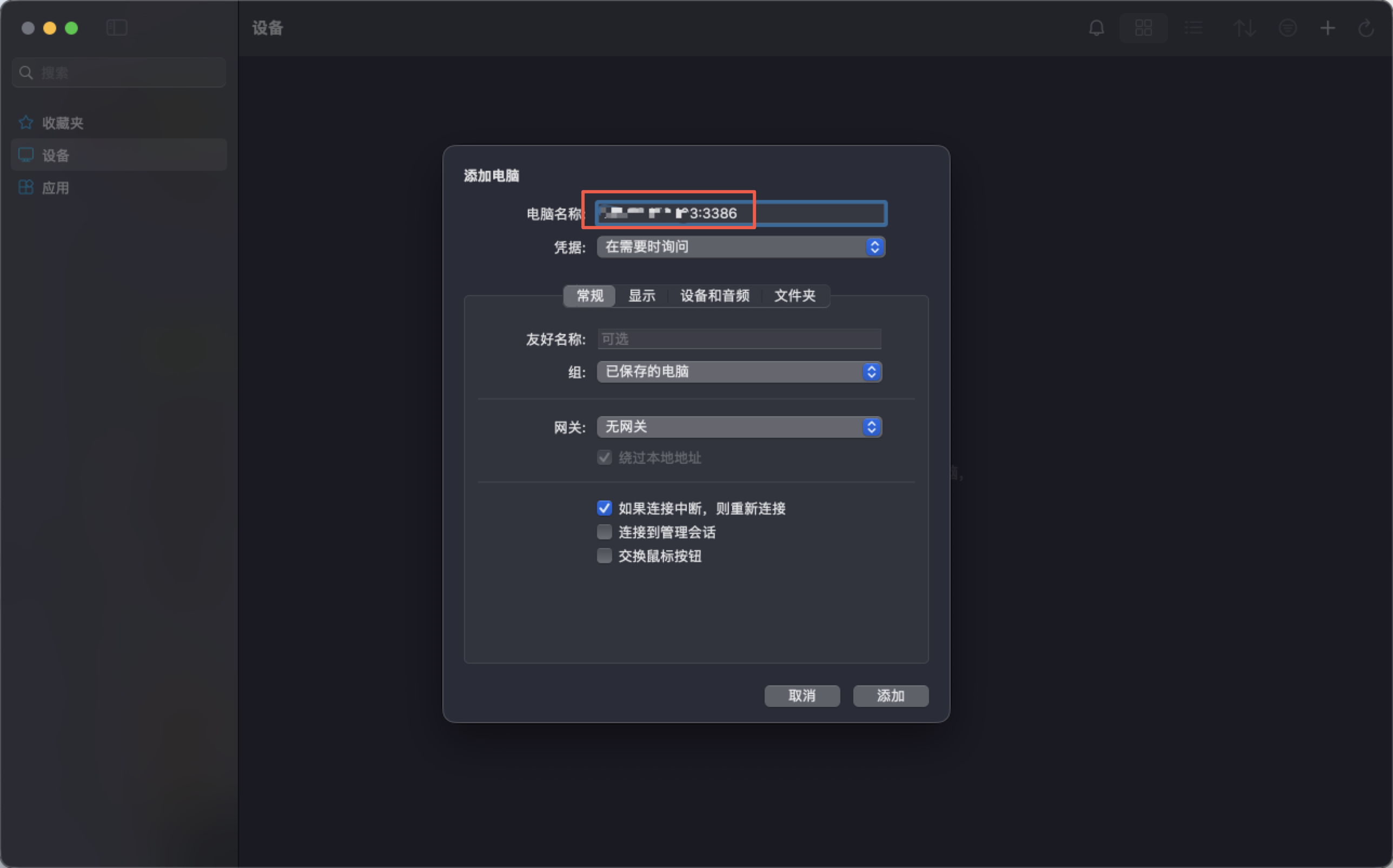
- 输入2.1步骤中中设置的用户名和密码
- 登陆远程桌面
2.3.2 Linux远程桌面
- 安装FreeRDP:
1 apt update && apt install -y freerdp2-x11- 启动FreeRDP连接服务:
1#启动xfreerdp 用户名和密码为2.1设置RDP远程桌面登陆的账号密码中设置的用户名和密码
2xfreerdp /v:<IP>:3386 /u:root /p:密码

- 启动后可以看到远程桌面,可能需要输入密码,输入的密码使用在2.1设置RDP远程桌面登陆的账号密码中设置的密码即可登录。
2.4 启动isaac-sim
在上面已经打开的RDP界面中,执行如下操作,从命令行启动isaac-sim客户端IsaacSim可视化界面:

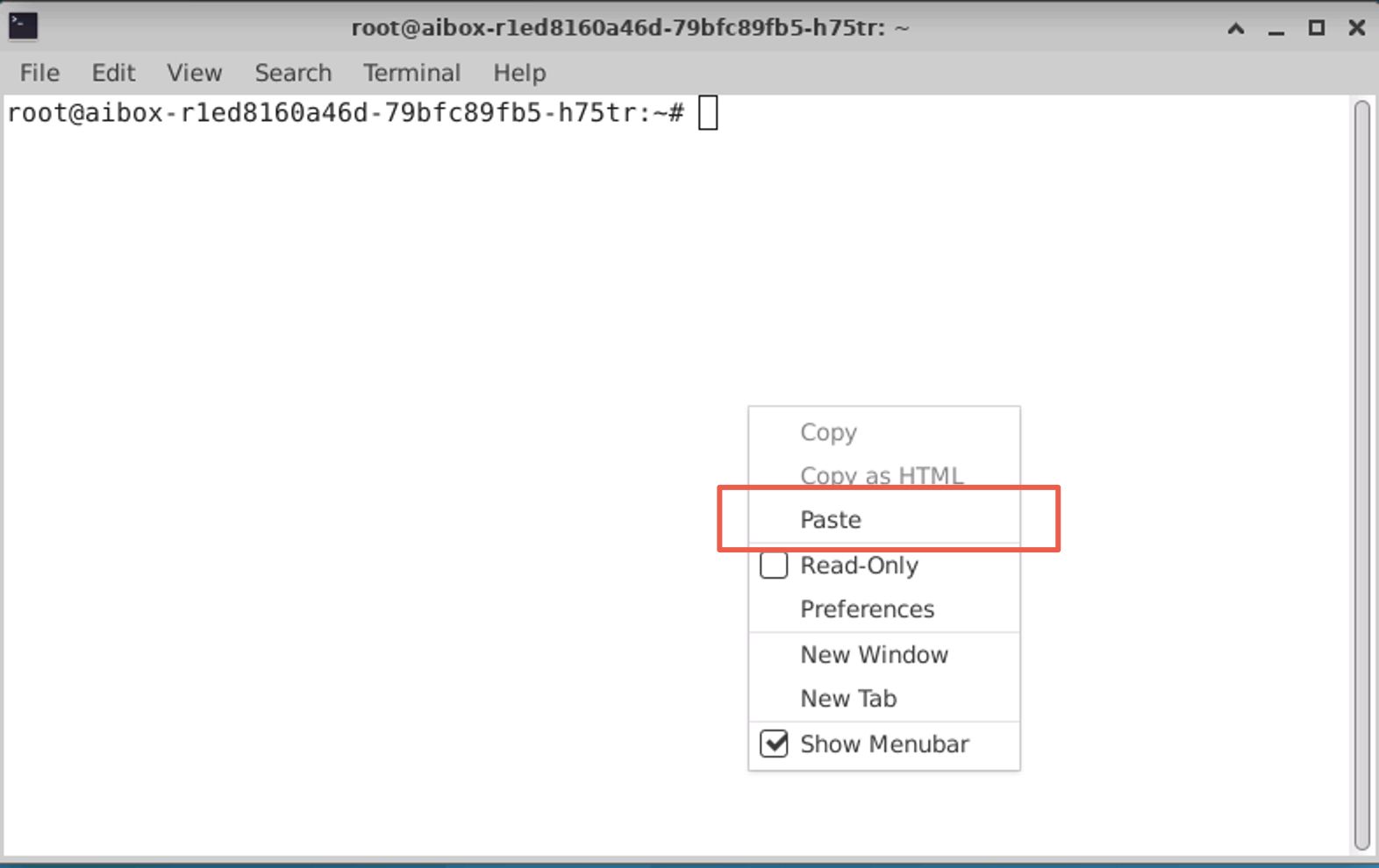
可视化界面为先出现窗口边框,加载过程结束后再出现窗口内容,创建开发机第一次加载可能会需要几分钟(下载一些服务依赖),之后再启动一般需要十秒左右。另外,IsaacSim在初始化和使用过程中可能会访问外网,建议设置HTTP和HTTPS网络代理
1# 先设置网络代理,再启动isaac-sim服务
2/isaac-sim/isaac-sim.sh --allow-root请使用nvidia-smi命令查看显卡驱动版本,如显卡驱动版本为535.261.03则建议使用
1# 先设置网络代理,再启动isaac-sim服务
2/isaac-sim/isaac-sim.sh --allow-root --/rtx/verifyDriverVersion/enabled=false启动结果:
命令行出现红框内字样,说明启动成功


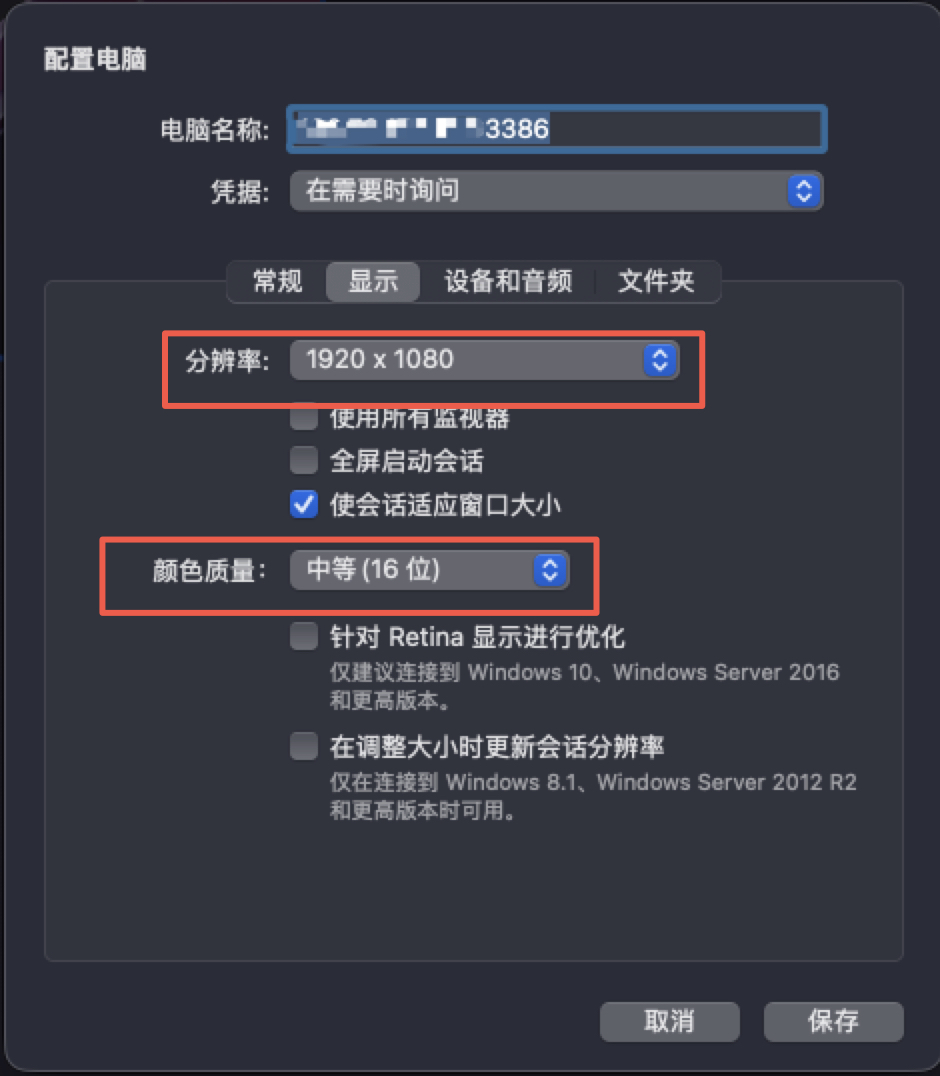
如果您的远程桌面在运行过程中出现卡顿现象,建议您降低远程连接的分辨率和颜色质量
3. 通过 webviewer 方式配置访问Isaac Sim环境
登录开发机,进入开发机webIDE,打开Terminal界面
3.1 启动webviewer和isaac sim streaming
- 启动webviewer服务
1# --out-streaming-ip 当前开发机的外网IP地址
2# --inner-streaming-port 开发机webviewer-tcp端口的【开发机容器监听端口】字段
3# --out-webrtc-tcp-port 开发机streaming-tcp端口的【BLB监听端口】字段
4~/start_webviewer.sh --out-streaming-ip <IP地址> --inner-webviewer-port <开发机容器监听端口> --out-streaming-tcp-port <BLB监听端口>
5# 使用下面的命令可关闭webviewer服务
6~/stop_webviewer.sh- 启动isaac sim streaming服务端,并查看日志确认完全启动
1# --out-streaming-ip 当前开发机的外网IP地址
2# --streaming-udp-port 开发机streaming-udp端口的【开发机容器监听端口】和【BLB监听端口】字段
3# --assets-root 开发机以bos方式加入的Assets文件夹,isaac sim 5.0可直接使用【/mnt/bos/isaac-sim/Assets/Isaac/5.0】这个值
4~/start_isaac_streaming.sh --out-streaming-ip <IP地址> --streaming-udp-port <端口号> [可选: --assets-root /mnt/bos/isaac-sim/Assets/Isaac/5.0]
5# 使用下面的命令可关闭isaac sim的streaming服务
6# ~/stop_isaac_streaming.sh
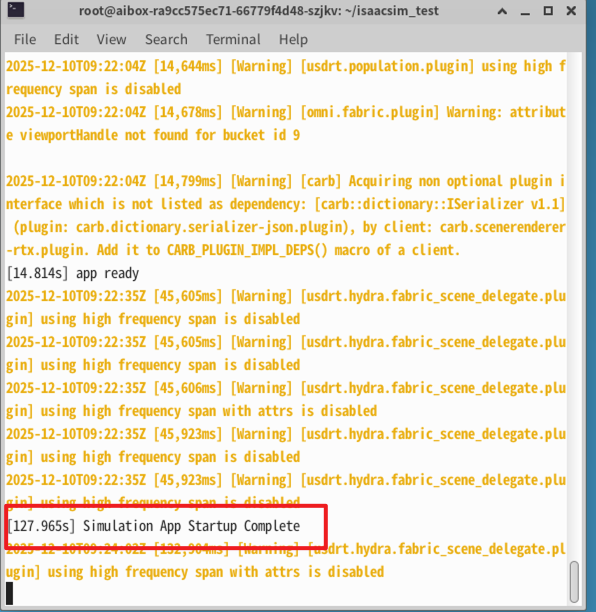
7# 持续查看日志,直到确认完全启动,完全启动判定见下图
8tail -f /root/isaac-sim.streaming.log确认完全启动方式: 看到日志中出现这个字样

注意: 每次启动isaac sim的streaming服务,只能连接一个客户端(每个使用webviewer登录的都会被视为一个客户端),如果前面的人没有关闭客户端,后面访问会出现空白页面。可以通过可重启streaming服务强制访问(注意,这会杀死当前正在进行的未保存工作)
重启streaming服务: 使用~/stop_isaac_streaming.sh关闭,再用~/start_isaac_streaming.sh启动(webviewer不需要重启)
3.2 使用webviewer连接Isaac Sim streaming服务
- 在开发机详情页中找到webviewer-port端口,复制【外网访问指令】,内容应是【IP:端口】

- 在chrome浏览器打开,出现下面的选择界面,选择下面的【UI for **any** streaming app】选项,再点击Next
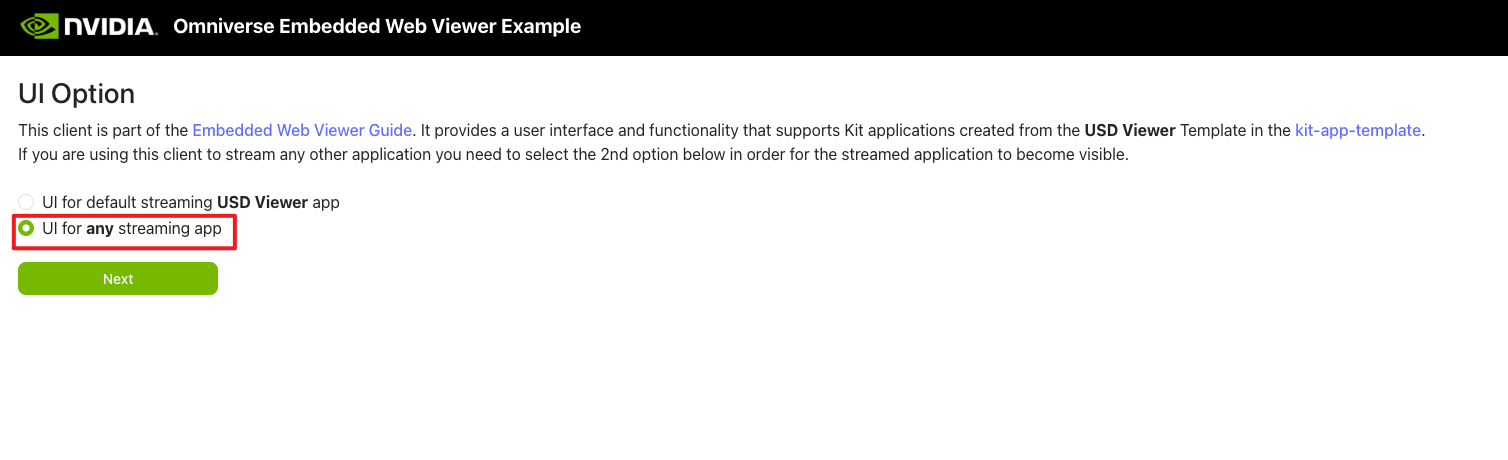
- 由于 webviewer 的方式不支持密码鉴权,推荐配置 LB 的安全组来控制来源 IP 范围,避免服务泄露。您可以在开发机详情找到开发机使用的 BLB,跳转到BLB 页面配置安全组信息。请参考:BLB 支持安全组
4. 案例演示
以 RDP 启动 Isaac sim 为例:
4.1 执行官方四足和人形可操作演示
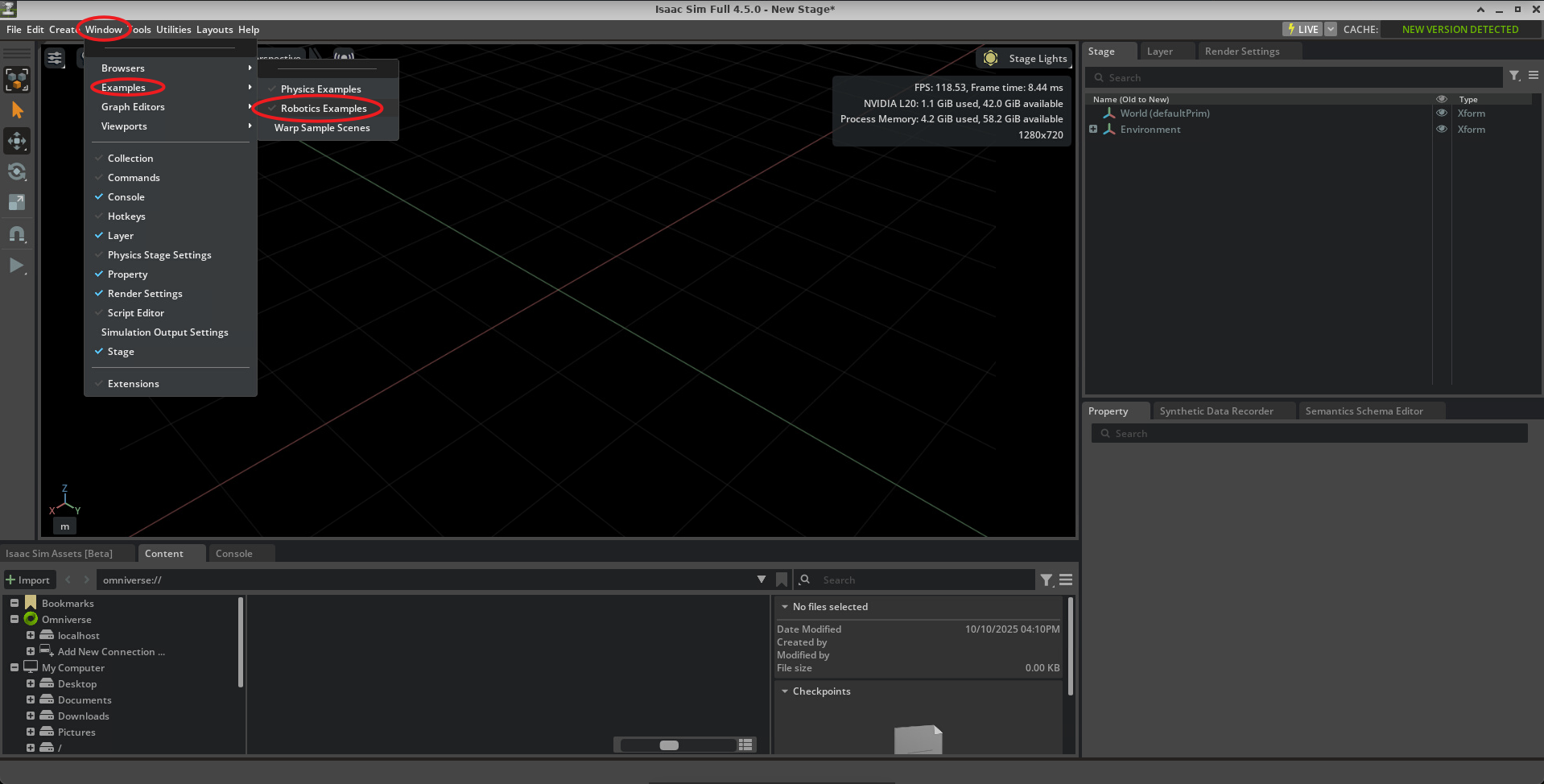
4.1.1 步骤一:开启机器人案例选项卡
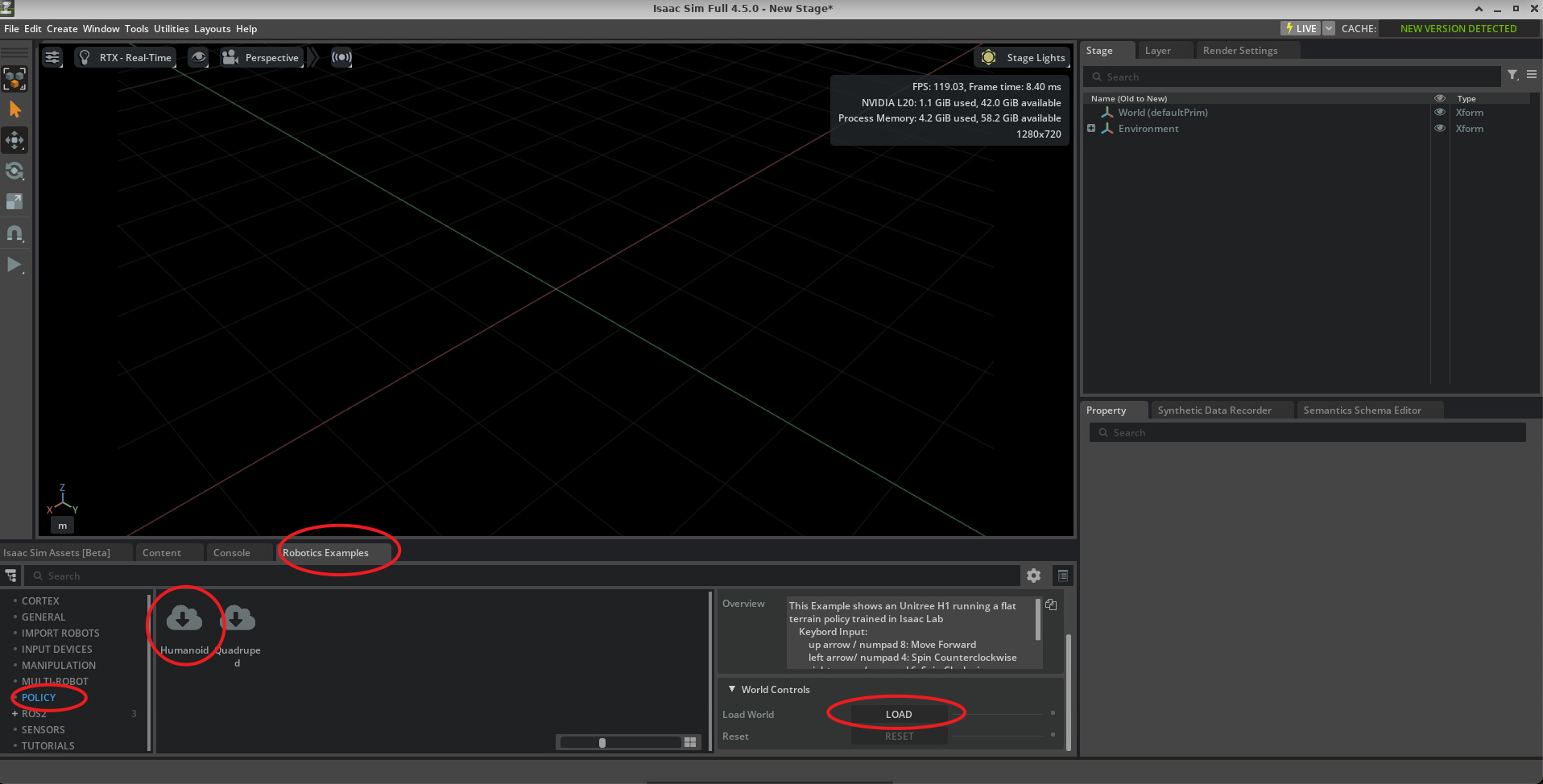
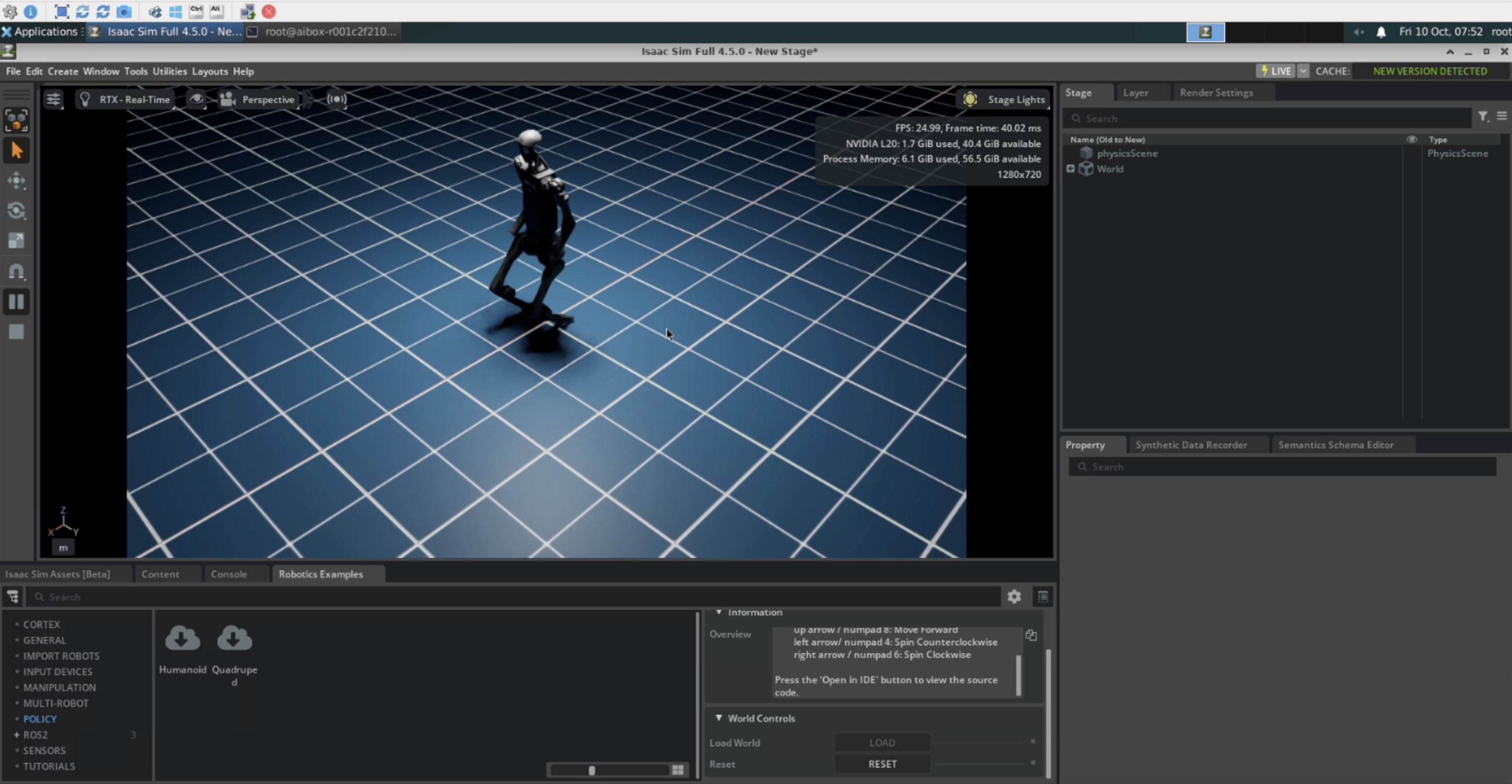
4.1.2 步骤二:加载Humanoid人形机器人案例
点击Load按钮加载,Reset按钮重置案例(或选择右侧的Quadruped四足机器人案例,也是点击Load按钮加载,Reset按钮重置案例)
 一般来说,对一个模型或者脚本点击Load按钮,客户端窗口会停止响应一些时间进行网络加载
一般来说,对一个模型或者脚本点击Load按钮,客户端窗口会停止响应一些时间进行网络加载
但在开发机刚新建时,这里的加载时间过长,也有几率是客户端卡死
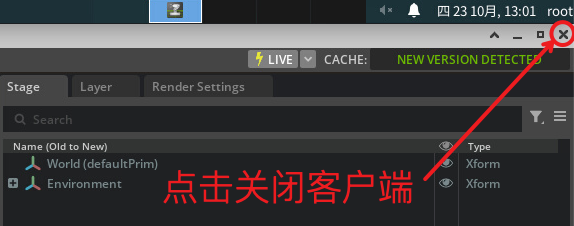
如果客户端卡死,则可以点击右上角的x关闭客户端后,在命令行再次执行命令启动,一般一到两次之后,一旦有一次Load成功,之后客户端就不会再卡死
4.1.3 步骤三:操作机器人
窗口缩放操作:
- 在窗口内使用鼠标滚轮
Humanoid人形机器人操作:
- 前进:向上箭头/数字键 8
- 左转:左箭头/数字 4
- 右转:右箭头/数字 6
Quadruped四足机器人操作:
- 前进:向上箭头/数字键 8
- 后退:后退箭头/数字 2
- 向左移动:左箭头/数字 4
- 向右移动:右箭头/数字键 6
- 左转:N / NUM 7
- 右转:M / NUM 9
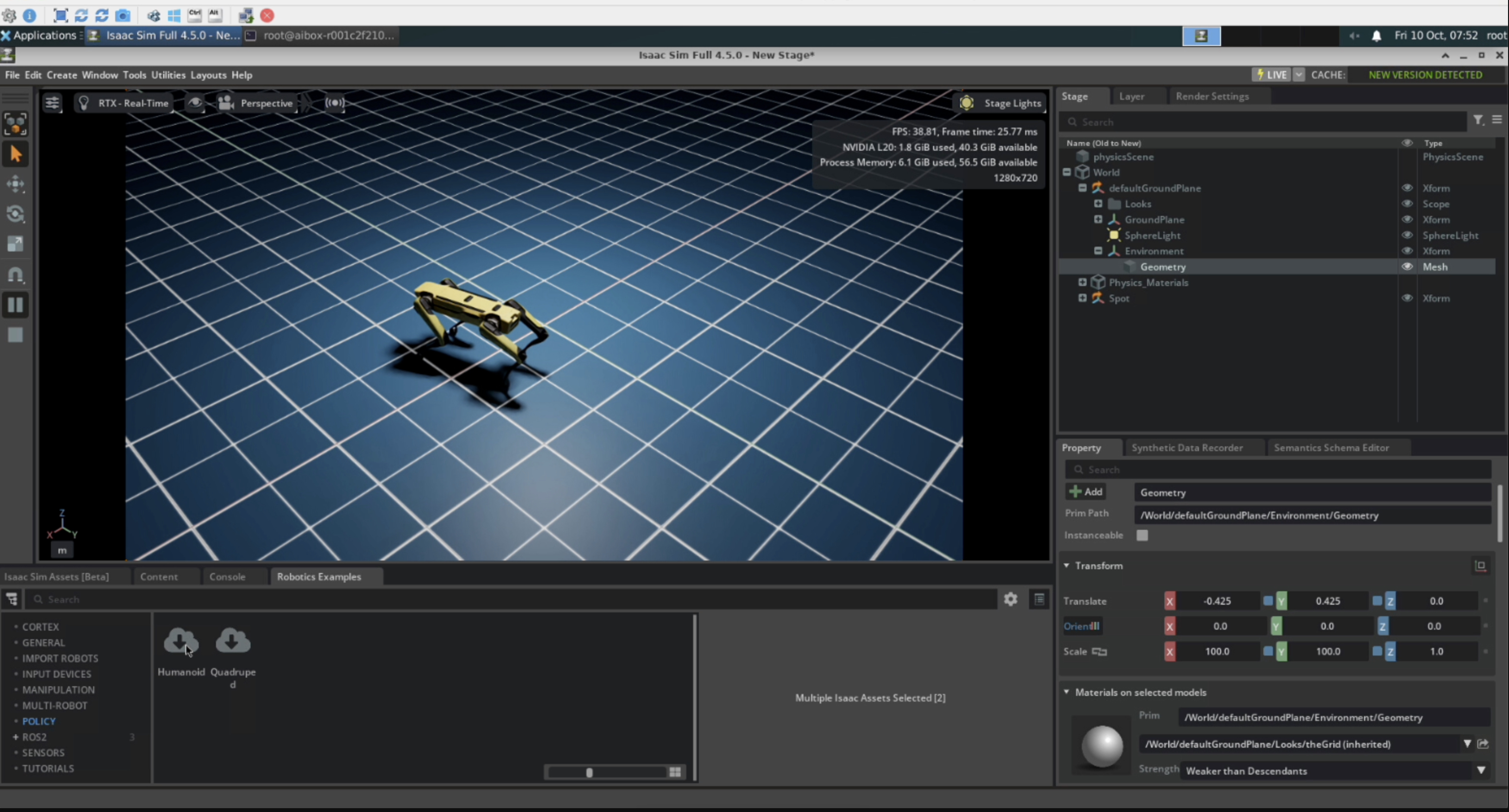
4.1.4 运行效果图片&视频
4.2 宇树GR1机器人简易操作演示
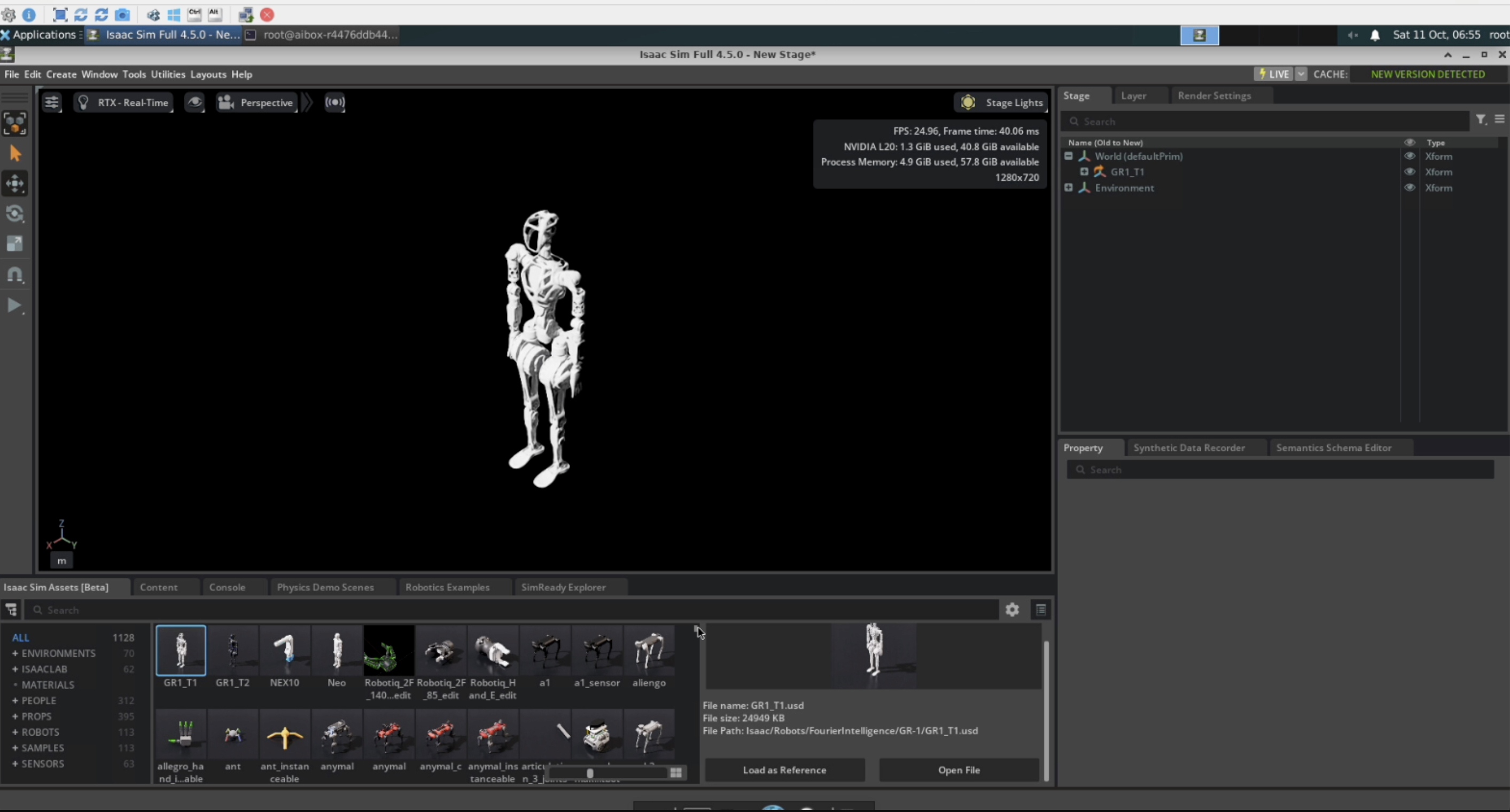
4.2.1 步骤一: 在Assets中找到GR1机器人,并加载到工作空间中
操作步骤:
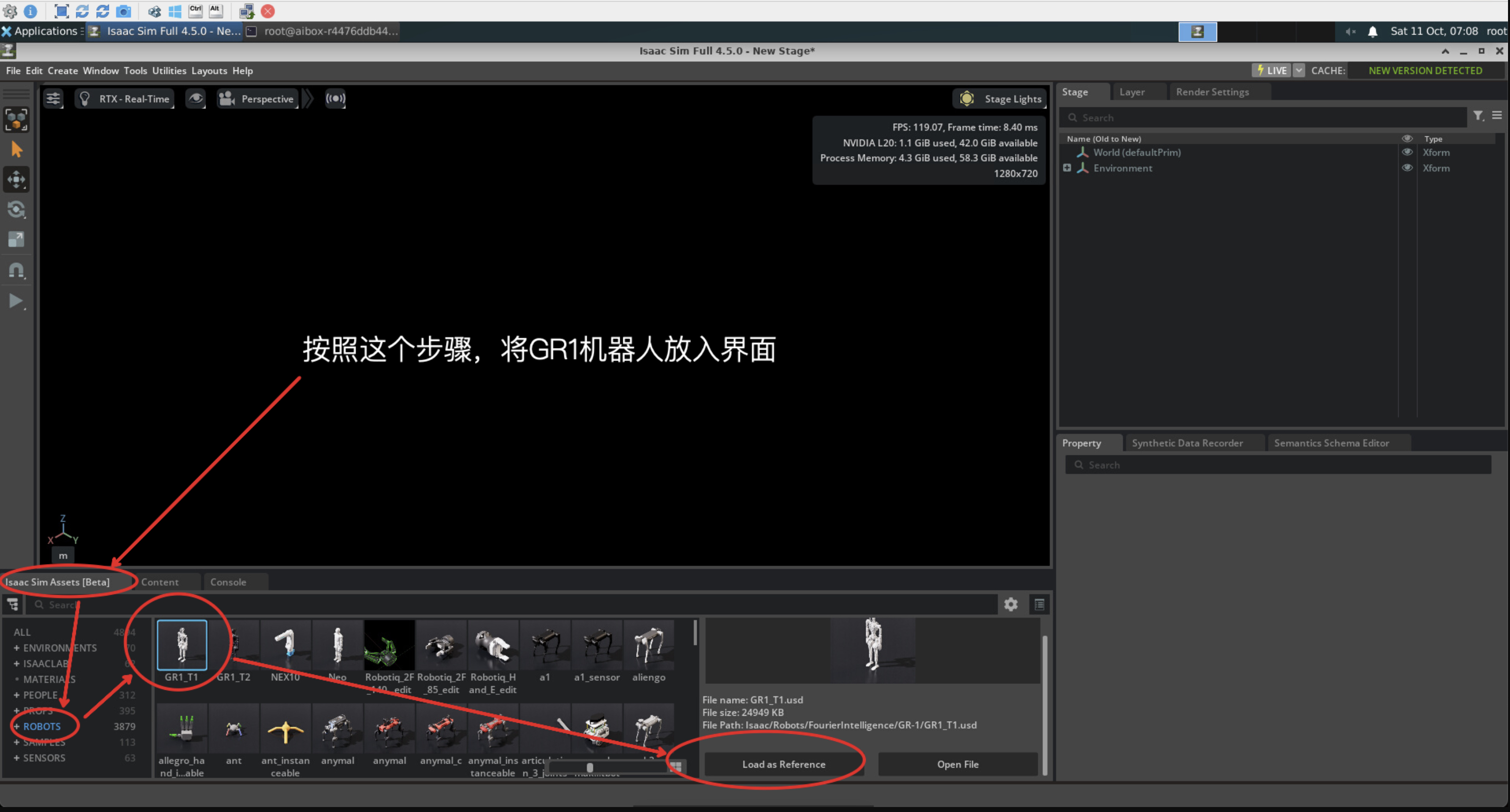
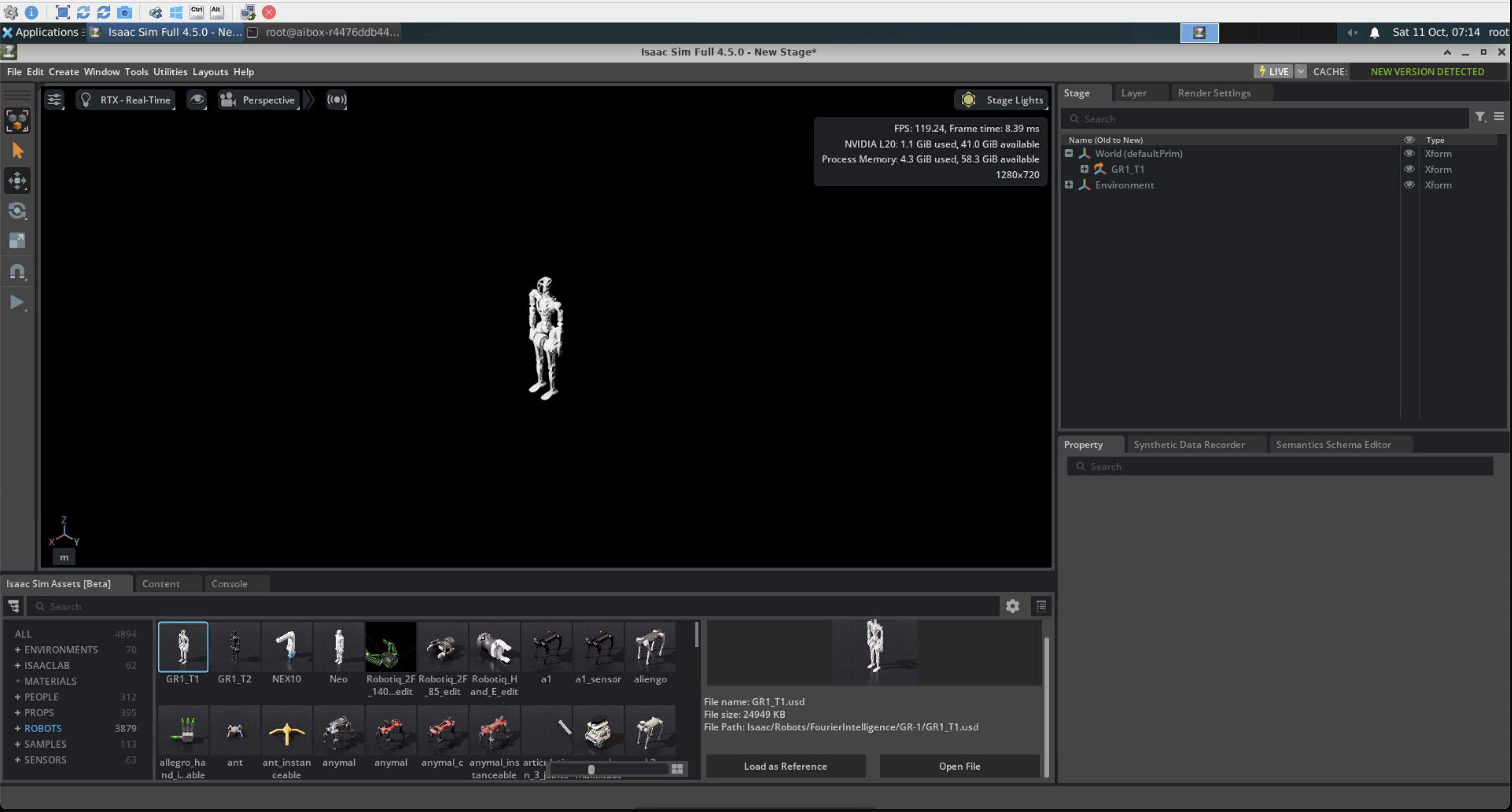
操作结果:
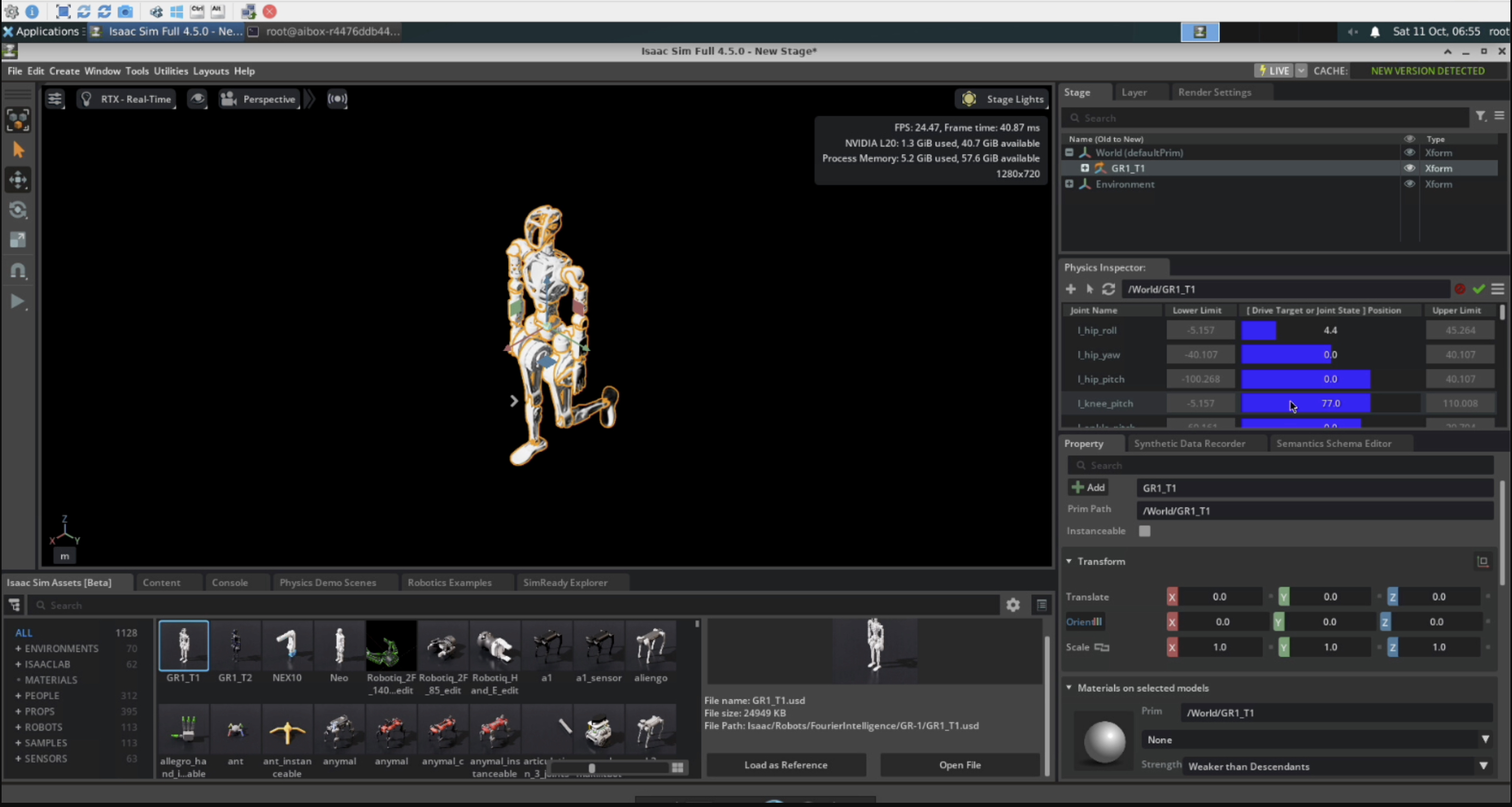
4.2.2 步骤二: 使用Physics Inspector工具,对关节进行简易操作
操作步骤:
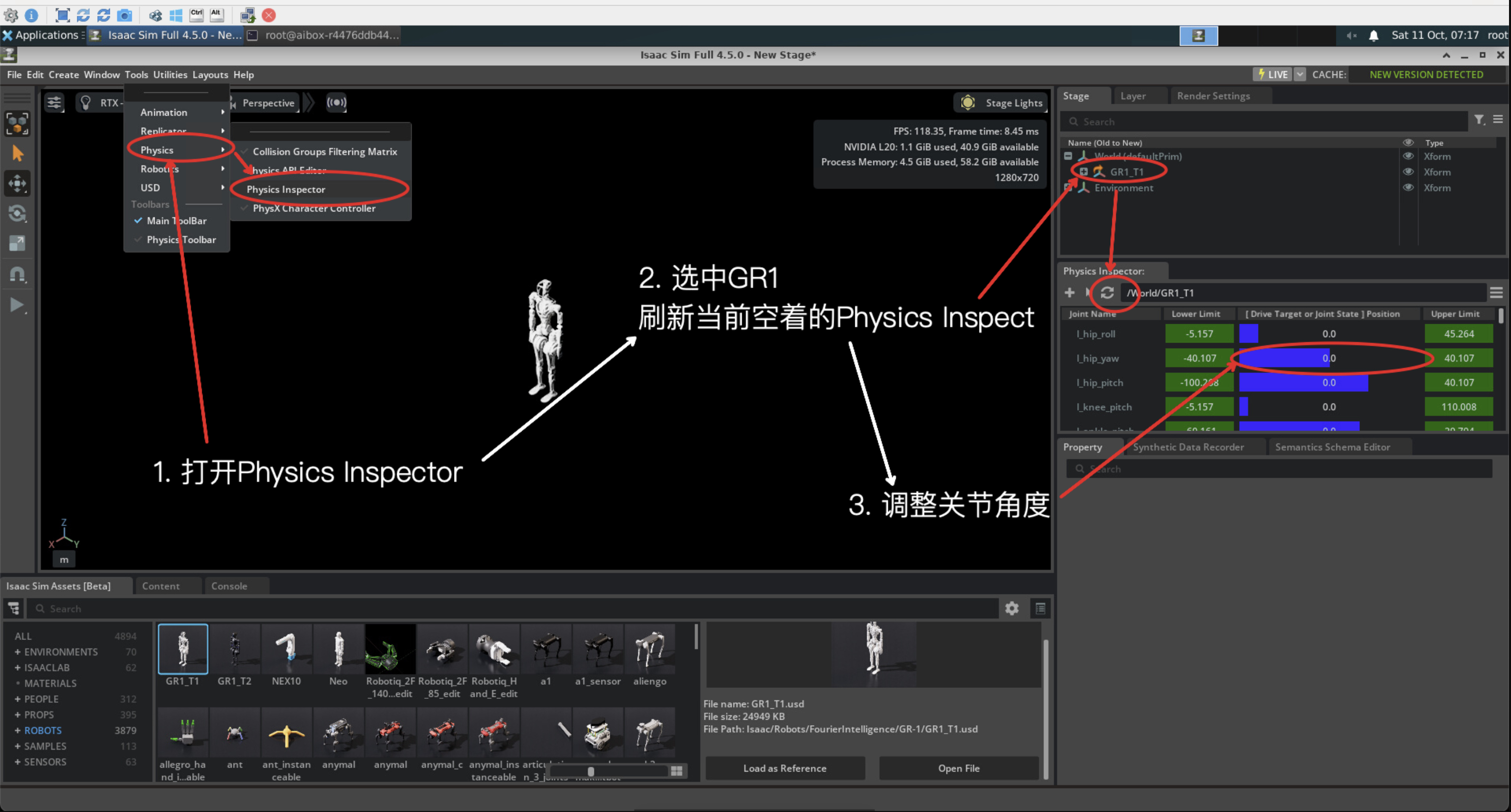
额外步骤:
如果按照上面操作后,Physics Inspector显示成下面的样子,则需要点击一下【Re-Enable authoring】按钮,就会显示关节角度界面
 操作结果图片&视频:
操作结果图片&视频:

4.3 Replicator 数据生成
Replicator,是一种用于生成具身智能训练数据的框架 这个框架可使用数据资产,根据要求,生成不同场景、不同情况、随机化的大量训练数据(生成结果可包含场景图片 + 精准标注) 数据资产可使用多种开源标准,例如通用场景描述(USD)、PhysX、材质定义语言(MDL) 基于官方公开的示例,其大致工作流程为:
| 步骤 | 内容 |
|---|---|
| 1. 定义场景 | 基于USD构建或加载一个3D场景 |
| 2. 配置生成规则 | 设置相机、灯光、随机化参数(如物体、纹理、位置的随机范围) |
| 3. 执行与记录 | 运行脚本,Replicator会自动在场景中采样大量随机状态,驱动渲染引擎和标注器,生成成对的图像和标注文件 |
| 4. 输出 | 结果以标准格式(如RGB图像、边界框JSON等)保存,可直接用于主流的AI训练框架(如PyTorch, TensorFlow) |
下面我们将展示几个官方的例子 这两个示例均是 Isaac Sim官网示例,两个示例各有侧重,从不同方面示范了如何使用Replicator插件
示例1:物品数据集合成
官方链接:Object Based Synthetic Dataset Generation
这是一个使用 Isaac Sim 和 Replicator 生成以物体为中心的合成数据集的示例,该脚本会在一个预定义的区域(由不可见的碰撞墙围成)内,生成带有标签的物体和干扰物体,并从多个相机视点捕捉场景。同时,该脚本还演示了如何随机化相机姿态、对物体施加随机速度,以及如何触发自定义事件来随机化场景。这些随机化器可以是基于 Replicator 的,也可以是基于自定义的 Isaac Sim/USD API 的,并且可以在特定时间触发。
示例 1-2:GUI模式
1# 创建工作目录(若已存在则跳过)
2mkdir -p ~/isaacsim_test
3# 进入工作目录,生成结果就会在当前目录下生成
4cd /root/isaacsim_test/
5
6# 下面的操作请注意根据Isaac Sim的不同版本加载不同的命令
7
8# 启动,使用的Assets为bos挂载盘,Isaac Sim 4.5.0版本
9/isaac-sim/python.sh /isaac-sim/standalone_examples/replicator/object_based_sdg/object_based_sdg.py --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/4.5"
10
11# 启动,使用的Assets为bos挂载盘,Isaac Sim 5.0.0版本
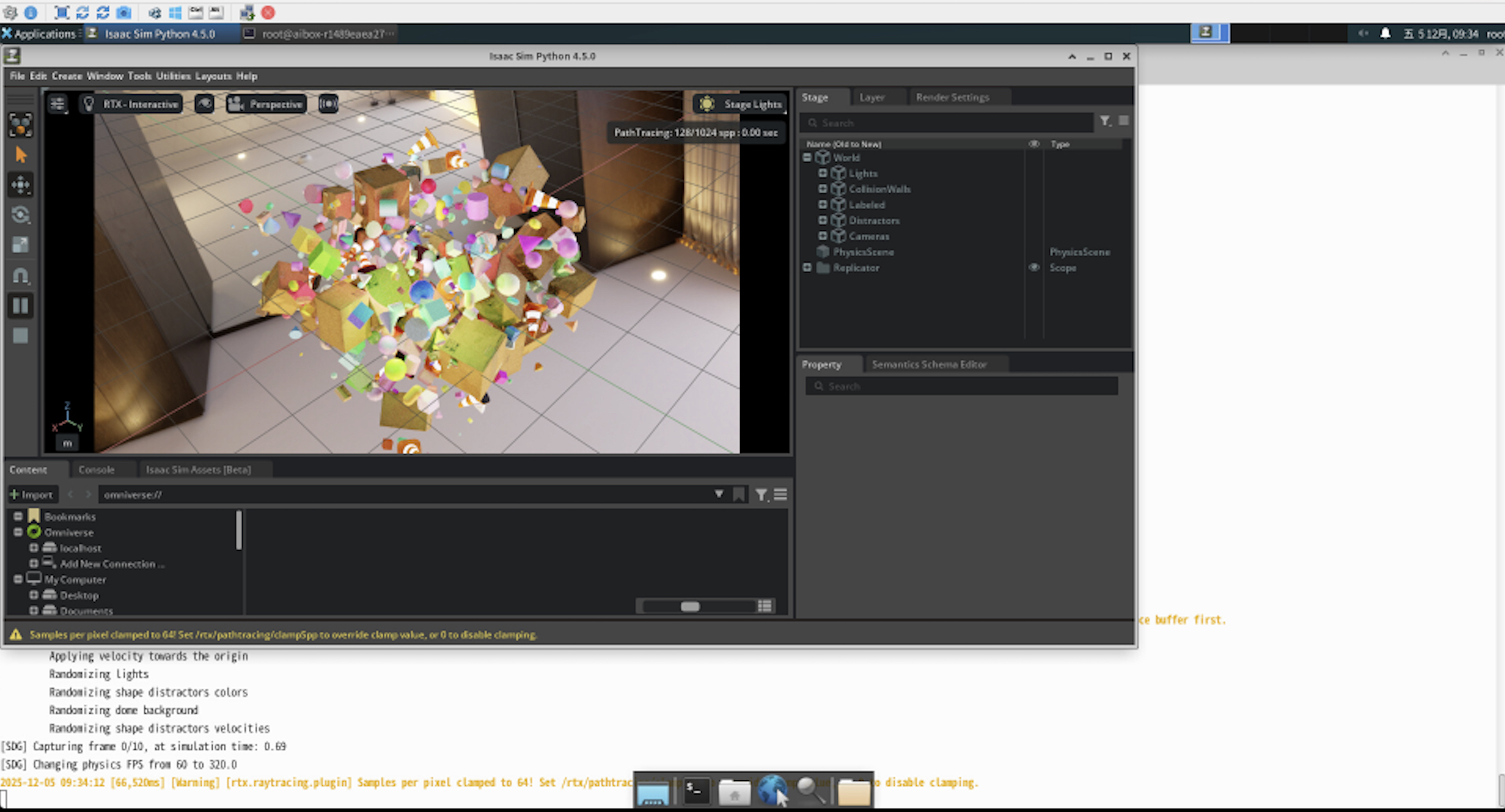
12/isaac-sim/python.sh /isaac-sim/standalone_examples/replicator/object_based_sdg/object_based_sdg.py --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/5.0"- 执行上面的文件后,会出现GUI界面
- 需要等待一段时间,直到命令行出现【Simulation App Startup Complete】字样,之后GUI界面内会开始加载各种信息
- 图像中的物品会在一个规划好区域内,随机运动 => 快要碰撞(距离小于阈值) => 随机重置运动(每次重置的时候会卡顿),这样反复循环,直到结束模拟
生成结果文件夹结构(当前工作目录下的_out_obj_based_sdg_pose_writer文件夹):
1# 会生成30个结果,每个结果中有两个图片和一个json文件,000000-000029,这里就都用0000XX代替
2# 其中0000XX.png是没有标注的图片,0000XX_overlay.png则会给目标物品进行标注
3_out_obj_based_sdg_pose_writer/
4├── 0000XX.json
5├── 0000XX_overlay.png
6├── 0000XX.png
7└── metadata.txt
8
90 directories, 91 files示例 1-2:Headless模式
####### 步骤 1:创建工作目录并拷贝官方脚本
执行以下命令,进入工作目录:
1# 创建工作目录(若已存在则跳过)
2mkdir -p /root/isaacsim_test
3# 进入目标目录
4cd /root/isaacsim_test/####### 步骤 2:新建配置
- 执行以下命令,生成配置文件
- 这个配置文件是以/isaac-sim/standalone_examples/replicator/object_based_sdg/config/object_based_sdg_centerpose_config.yaml 为基础,添加上headless: true,来达到无GUI模式的目的
- 并且加上renderer: RaytracedLighting,来启动自然光源渲染方式
1cat > ./object_based_sdg_centerpose_config_headless.yaml << 'EOF'
2launch_config:
3 renderer: RaytracedLighting
4 headless: true
5writer_type: PoseWriter
6writer_kwargs:
7 output_dir: _out_obj_based_sdg_pose_writer_centerpose
8 format: centerpose
9 write_debug_images: true
10 skip_empty_frames: false
11EOF####### 步骤 3:运行脚本生成合成数据
执行以下命令启动数据生成(指定配置文件和 3D 资产路径):
1# 下面的操作请注意根据Isaac Sim的不同版本加载不同的命令
2
3# 启动,使用的Assets为bos挂载盘,并使用刚才修改/生成的文件作为配置文件,Isaac Sim 4.5.0版本
4/isaac-sim/python.sh /isaac-sim/standalone_examples/replicator/object_based_sdg/object_based_sdg.py \
5 --config="./object_based_sdg_centerpose_config_headless.yaml" \
6 --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/4.5"
7
8# 启动,使用的Assets为bos挂载盘,并使用刚才修改/生成的文件作为配置文件,Isaac Sim 5.0.0版本
9/isaac-sim/python.sh /isaac-sim/standalone_examples/replicator/object_based_sdg/object_based_sdg.py \
10 --config="./object_based_sdg_centerpose_config_headless.yaml" \
11 --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/5.0"结果查看生成的数据存储路径:/root/isaacsim_test/_out_obj_based_sdg_pose_writer_centerpose,也就是当前执行目录下创建_out_obj_based_sdg_pose_writer_centerpose文件夹
示例2 自助移动机器人导航数据集合成
官方链接:Randomization in Simulation – AMR Navigation
使用 Isaac Sim 与 Replicator 从模拟环境中采集合成数据的示例(AMR 导航),本教程旨在演示如何设置一个 Isaac Sim 模拟场景,并结合 omni.replicator 扩展,利用多样化的随机化技术来采集合成数据,将多种随机情况混合在一起。
示例 1-1:GUI 模式
1# 创建工作目录(若已存在则跳过)
2mkdir -p ~/isaacsim_test
3# 进入工作目录,生成结果就会在当前目录下生成
4cd /root/isaacsim_test/
5
6# 下面的操作请注意根据Isaac Sim的不同版本加载不同的命令
7
8# 启动,使用的Assets为bos挂载盘,Isaac Sim 4.5.0版本
9/isaac-sim/python.sh /isaac-sim/standalone_examples/replicator/amr_navigation.py --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/4.5"
10
11# 启动,使用的Assets为bos挂载盘,Isaac Sim 5.0.0版本
12/isaac-sim/python.sh /isaac-sim/standalone_examples/replicator/amr_navigation.py --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/5.0"- 执行上面的文件后, 等到命令行内出现【Simulation App Startup Complete】字样后,之后GUI界面内会开始加载各种信息
-
gui界面开始播放后,可以在Isaac Sim Python窗口内使用下面的操作
- 按住鼠标右键可操控场景镜头朝向(镜头改变方向和鼠标移动方向相同)
- 鼠标滚轮控制镜头缩放
- 生成结果文件夹结构(当前工作目录下的_out_obj_based_sdg_pose_writer文件夹):
1# 会生成9个结果,每个结果中有两个图片文件,0000-0008,这里就都用000X代替
2# 其中left_sensor文件夹是左侧镜头的图片,right_sensor文件夹是右侧镜头的图片
3_out_nav_sdg_demo/
4├── left_sensor
5│ └── rgb
6│ ├── rgb_000X.png
7├── metadata.txt
8└── right_sensor
9 └── rgb
10 ├── rgb_000X.png
11
124 directories, 19 files示例 2-2:Headless模式
按照下述操作执行
1# 创建工作目录(若已存在则跳过)
2mkdir -p ~/isaacsim_test
3# 进入工作目录
4cd /root/isaacsim_test/
5# 复制官方例子,并且把启动模式从gui图像模式替换为无GUI命令行模式
6cp /isaac-sim/standalone_examples/replicator/amr_navigation.py ./
7sed -i 's/simulation_app = SimulationApp(launch_config={"headless": False})/simulation_app = SimulationApp(launch_config={"headless": True})/g' ./amr_navigation.py
8
9# 下面的操作请注意根据Isaac Sim的不同版本加载不同的命令
10
11# 启动,使用的Assets为bos挂载盘,Isaac Sim 4.5.0版本
12/isaac-sim/python.sh ./amr_navigation.py --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/4.5"
13
14# 启动,使用的Assets为bos挂载盘,Isaac Sim 5.0.0版本
15/isaac-sim/python.sh ./amr_navigation.py --/persistent/isaac/asset_root/default="/mnt/bos/isaac-sim/Assets/Isaac/5.0"评价此篇文章