
具身智能-Isaac Sim
工具介绍
NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台。通过GPU加速物理引擎来实现精确仿真,并支持大规模、多传感器RTX渲染。集成数据生成、强化学习、ROS集成和数字孪生模拟等端到端工作流程。
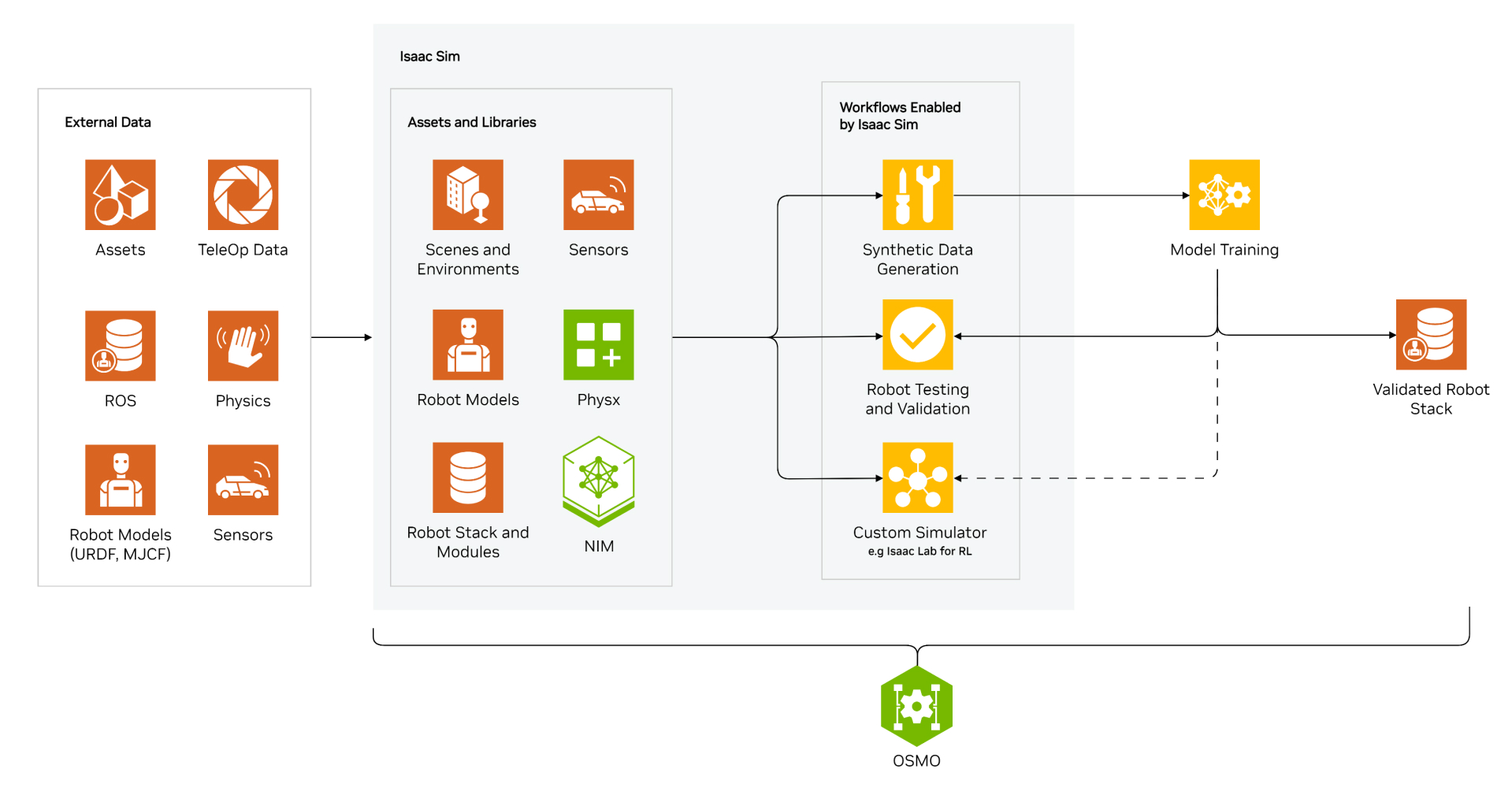 NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,支持从URDF、MJCF和CAD等常见格式导入机器人系统。通过GPU加速物理引擎来实现精确仿真,并支持大规模、多传感器RTX渲染。集成数据生成、强化学习、ROS集成和数字孪生模拟等端到端工作流程。其优势包括:
NVIDIA Isaac Sim是基于NVIDIA Omniverse构建的机器人仿真平台,支持从URDF、MJCF和CAD等常见格式导入机器人系统。通过GPU加速物理引擎来实现精确仿真,并支持大规模、多传感器RTX渲染。集成数据生成、强化学习、ROS集成和数字孪生模拟等端到端工作流程。其优势包括:
- 资产导入&导出:支持从非USD格式导入机器人和环境,或将其导出为非USD格式;
- 机器人微调:优化机器人的物理精度、计算效率或真实感;
- 机器人仿真:提供全流程运动控制工具链,如控制器、运动生成和运动学求解器以及策略集成接口;
- 传感器系统:支持RTX和物理学传感器。
部署环境要求&最佳实践建议
| 部署要求 | 最佳实践 | |
|---|---|---|
| CPU | 建议8核及以上 | 按需 |
| 内存 | 建议64G及以上 | 按需 |
| GPU | Isaac Sim 4.5.0 : A10 / A100 / A800 / H20 / H800 / L20 / 支持RT Core的GPU卡 ×1 Isaac Sim 5.0.0 : L20/支持RT Core的GPU卡 ×1 |
按需 |
| CDS | 按需 | 按需 |
| 其它 | 无 | 无 |
Isaac Sim 5.0的仿真渲染依赖DLSS(超采样技术,Deep Learning Super Sampling),因此推荐使用支持RT Core的系列显卡。
服务网卡配置
由于该工具的较多场景需要访问外网,可以通过设置服务网卡,并设置HTTPS网络代理支持。服务网卡的配置参考
使用说明
本文以纯python脚本形式启动两个任务为例,简单介绍Isaac Sim的使用。
在试用案例之前,请确保已挂载了案例所需的数据集,否则脚本无法正常运行,可在脚本内更改数据集地址配置。
创建与登录开发机
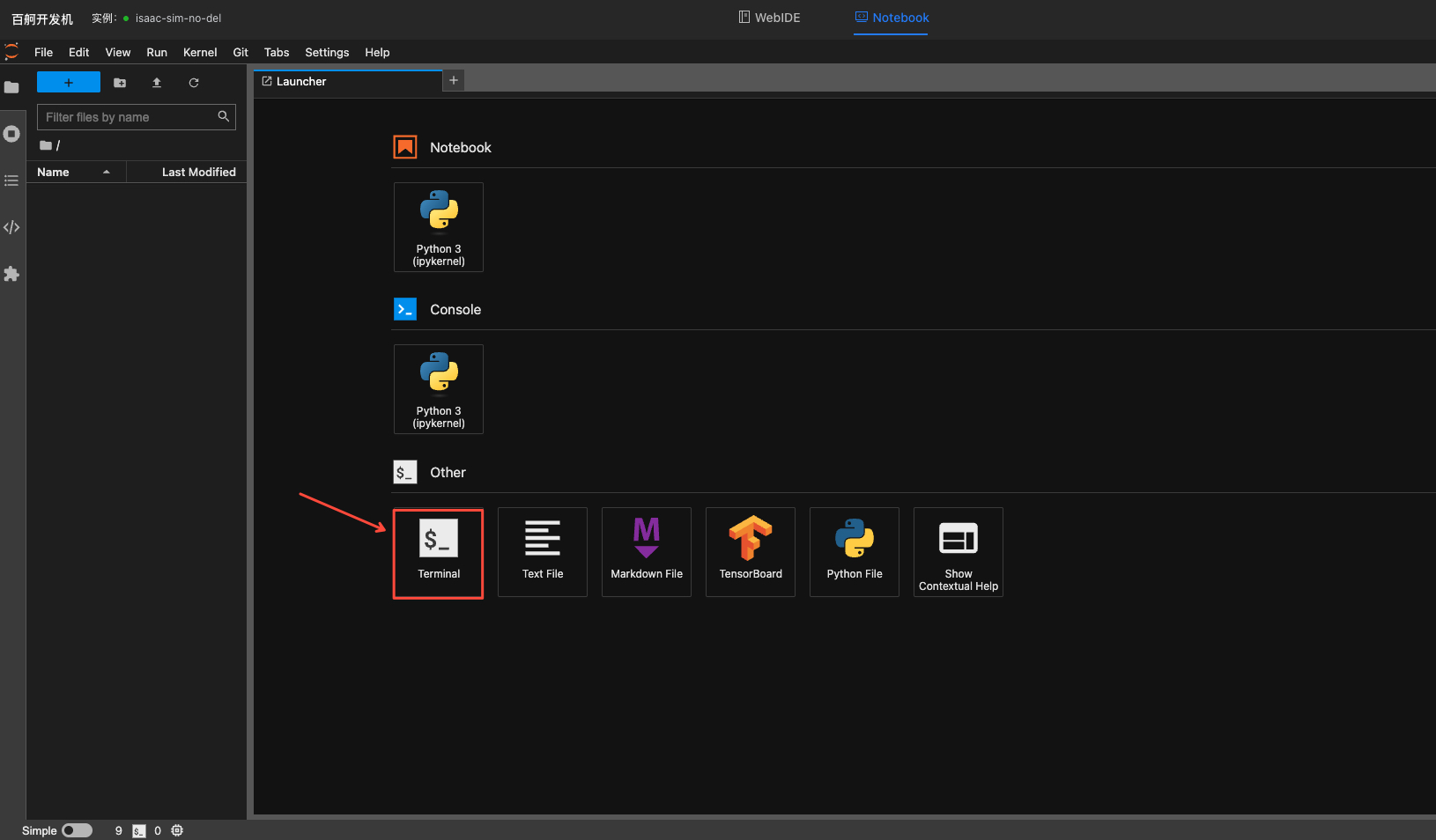
根据部署环境要求成功创建开发机后,点击登录开发机,进入开发机webIDE,打开Terminal界面:
主要路径介绍
- Isaac Sim USD资产挂载路径:/mnt/bos/isaac-sim,该目录下存有Issac Sim预置的部分USD资产。
快速开始
立方体碰撞模拟
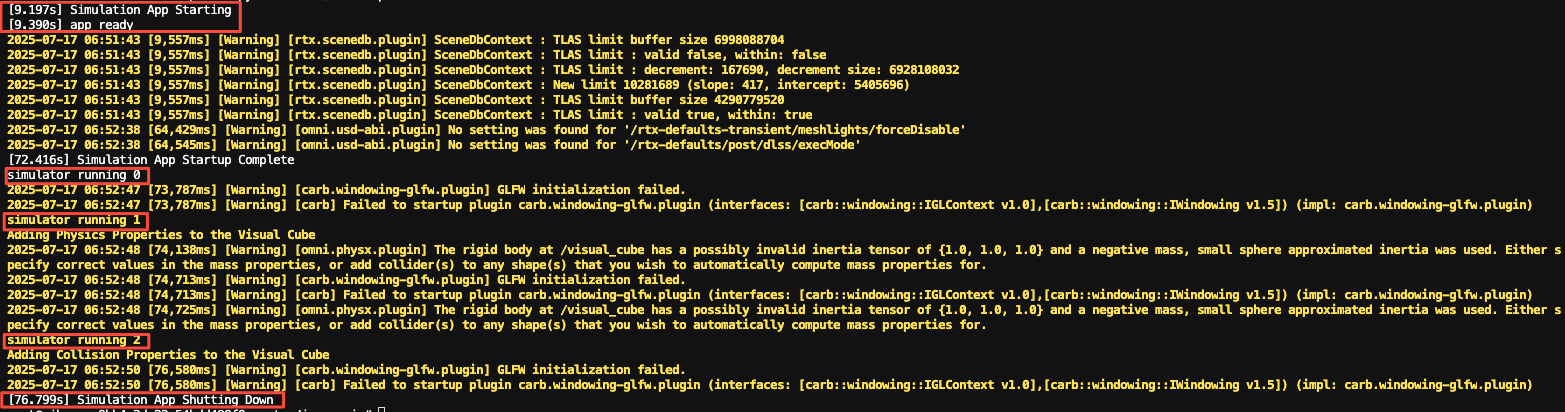
该任务主要模拟了不同属性的立方体,并逐步为其中一个视觉立方体添加物理属性(刚体属性)和碰撞属性的过程。
执行如下命令即可启动任务:
1cd ~/workspace/quick_start
2/isaac-sim/python.sh my_getting_started.py相比standalone_examples/tutorials/getting_started.py,my_getting_started.py设置当前仿真环境为headless模式。
运行结果如下所示:
2.2 机械臂&小车运控模拟
该任务主要模拟了机械臂和小车在同一环境下的运动控制。
执行如下命令即可启动任务:
1cd ~/workspace/quick_start
2/isaac-sim/python.sh my_getting_started_robot.py相比standalone_examples/tutorials/getting_started_robot.py,my_getting_started_robot.py的改动主要在以下三个地方:
- 设置当前仿真环境为headless模式;
- 用USD挂载路径代替函数get_assets_root_path(),避免网络访问限制导致任务运行失败;
- 用GroundPlane(prim_path="/World/GroundPlane", z_position=0)代替my_world.scene.add_default_ground_plane(),创建地面对象,避免网络访问限制导致任务运行失败。
运行结果如下所示:

评价此篇文章