
断句识别
更新时间:2024-03-04
功能概述
断句识别为机器人判断一个人是否说完话的能力,当前通过用户说完一句话后空白时间间隔配置判断。支持在机器人层面和会话节点层面进行配置。
机器人全局配置:支持按照机器人维度配置断句识别时间(当用户说话停顿多少毫秒以上时进行断句,默认700ms)
按会话节点配置:可以根据不同对话情况自定义调节对呼叫对象回复内容的切割判断时间,来实现客户回答后机器人可做到快速响应。如针对有大量信息收集的场景,将配置设长;针对“满意、不满意”短词语回答的场景设置短的断句。
操作路径
机器人全局配置
点击 我的机器人 --选择具体机器人--编辑,页面最下方的“高级配置”

会话节点配置
对话节点 支持按照对话节点维度配置断句识别时间,若节点未配置,默认按照机器人维度的VAD时间
- 在对应节点,选择变量(如下图示例):vad(系统变量)=数字 + 对应节点希望设置的数值
(数字范围200—2000,数字<200时默认为200,数字>2000时默认为2000)
- 指令下拉栏勾选指令:断句识别(vad)
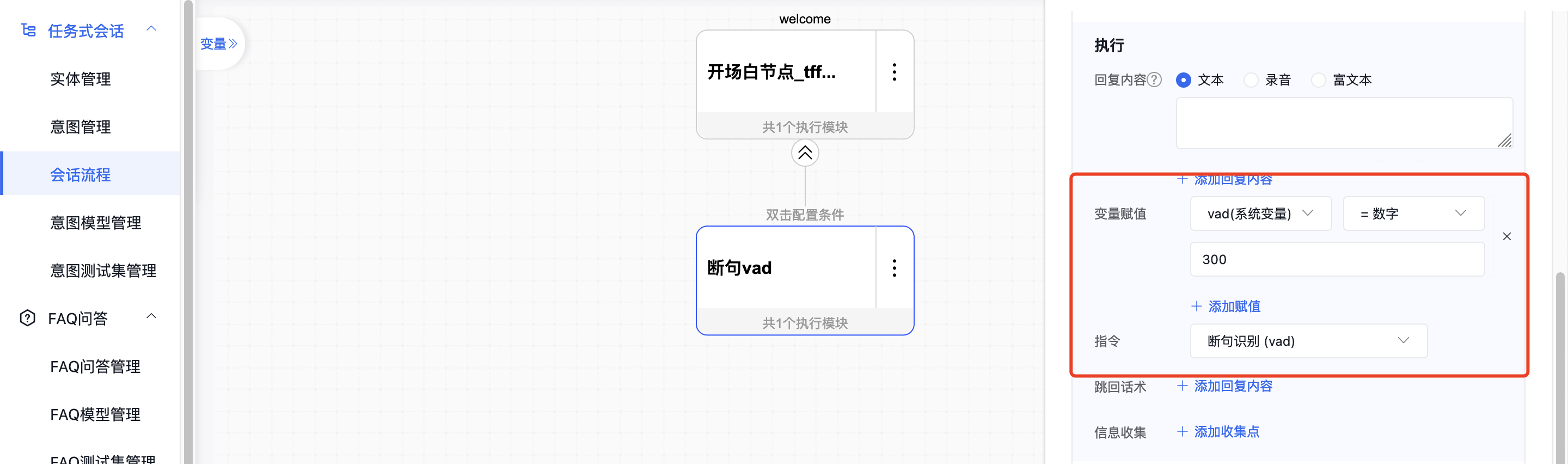
点击保存,保存对应节点配置。
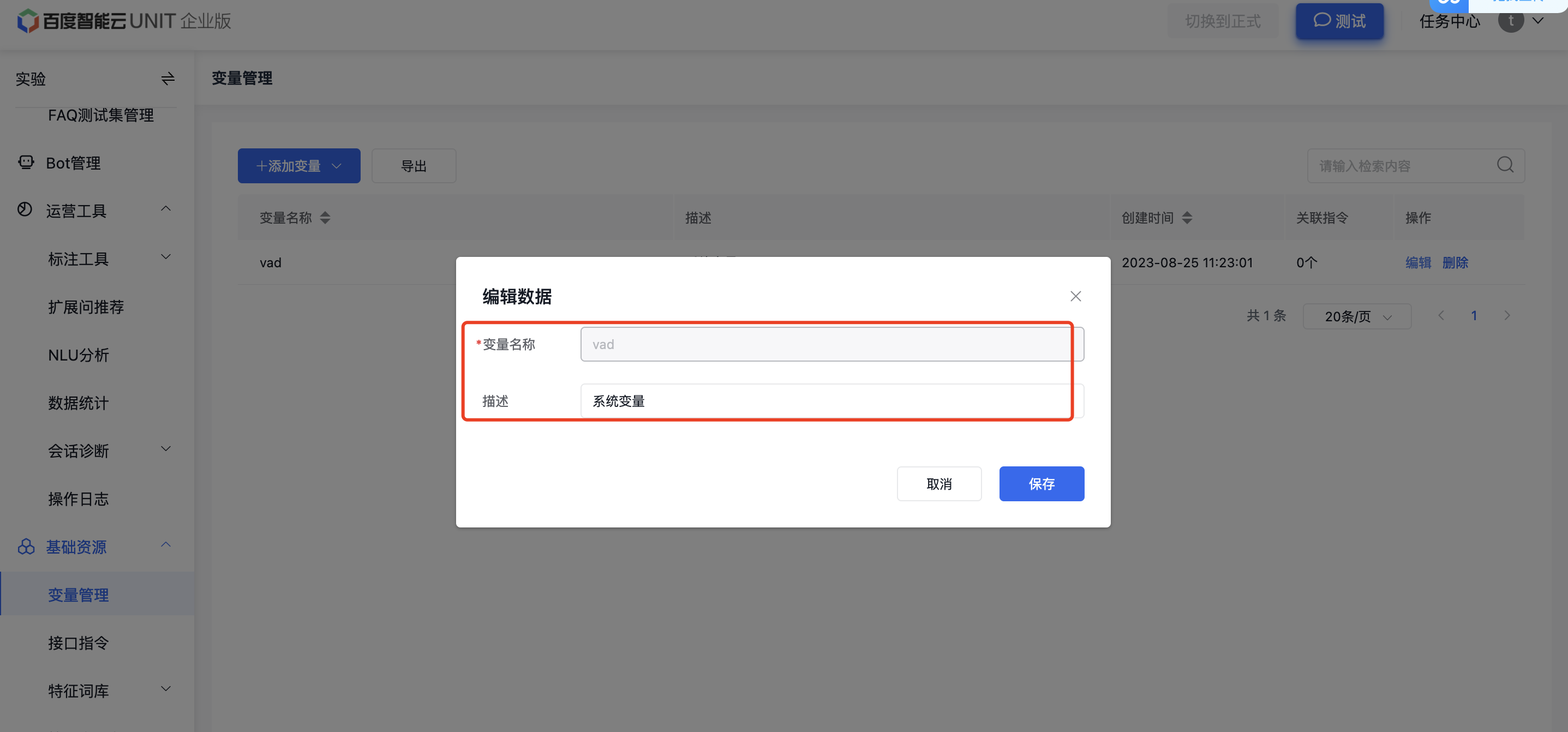
PS:断句识别能力2023年8月25号上线;自上线之后创建的机器人会默认创建内置变量、断句识别指令,此日期前创建的机器人需手动新建变量及指令 基础资源—变量管理中添加变量,变量名称和备注如下图所示:
基础资源—接口指令中新增指令,指令名称和标识如下图所示:
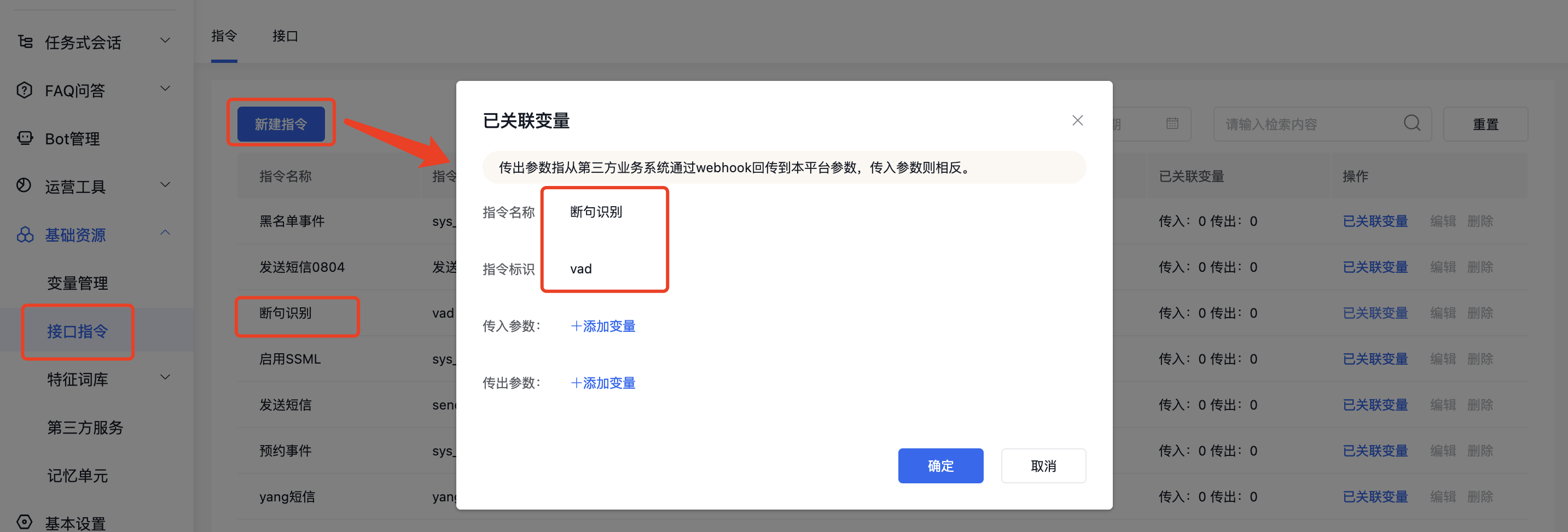
指令及变量创建完成后可进入节点级别的VAD编辑设置。
评价此篇文章