
SLAM
更新时间:2021-05-27
SLAM
SLAM (simultaneous localization and mapping)译为即时定位与地图构建,SLAM属于AR的基础模块,属于设备感知周围坏境的范畴。百度ARSLAM 2.0考虑到不同机型的通用性,在设计的技术方案时更侧重于即时跟踪(instant tracking)。
SLAM 实现
基本设置
Slam类型创建后,可在【项目配置】中看到【SLAM配置】,其中可对初始模型放置模式进行选择。如下图所示。
【场景放置模式】分为根据屏幕位置放置和跟据俯仰角放置。
根据屏幕位置放置:模型会出现在手机屏幕中心对应的真实世界的位置,可以设定模型初始相对屏幕的位置。
根据俯仰角放置:模型会出现在地理坐标系中的位置,需要改变设备俯视/仰视角度更改初始化模型位置。
【初始屏幕位置(x,y)】此项针对你选择了根据初始屏幕位置放置后配置,可设置模型初始出现位置。默认0.5,0.5即是屏幕中心。
【初始俯仰角】取值-90至90度,如设置-90开启预览需将手机镜头向下转90度形成俯视方能看到模型。0度即正常垂直设备镜头即可看到模型。
【初始化距离】初始模型放置距离相机的距离,该数值越大模型距离镜头越远。有近大远小的效果。
LUA API
SLAM类 : Slam
start_slam开启slam (最低使用版本120)slam_reset 重置slam
on_slam_direction_guide slam模式下引导提示的状态和位置
模型要求
- 模型在网格中必须按照下图呈现效果设置,提高SLAM下模型的稳定性(确保模型中心点位于模型底部中心位置)。
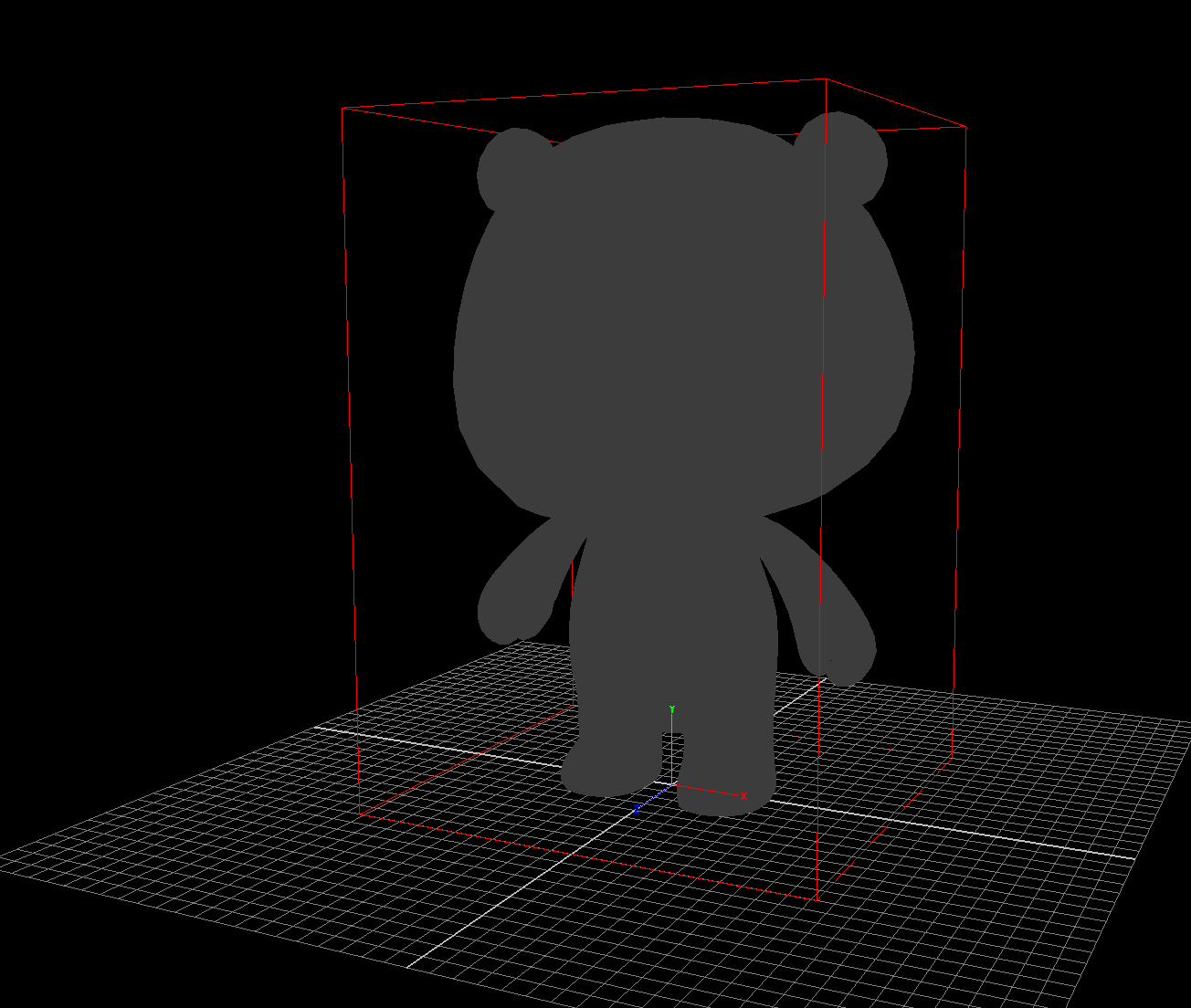
SLAM模型制作示例图
使用限制
1、不能和手势识别结合使用(目前编辑器还未上线手势识别能力)。
2、使用slam能力时,注意模型面数不要过大,模型面数过大可能会对性能产生影响。
3、Slam类型下模型使用高级材质渲染对slam的效果也会产生影响,建议不要结合使用。