
导览讲解
更新时间:2021-03-22
导览讲解功能介绍
导览讲解功能是面向展厅场景,让机器人为参观者提供讲解服务。项目管理者可以通过编排导览线路、配置讲解内容的方式,替代部分讲解员的重复性较高的导览讲解工作,同时提升展厅科技形象。
触发方式
- 开始导览:用户可以在机器人端通过“开始导览”,“开始参观”,“我要参观”,“带我参观这里”,“带我参观科技园”等话术触发导览讲解功能。触发后,机器人播报“好的,请跟我来”,随即前往起始点,按已经编排好的路线进行导览讲解。
- 继续导览:在机器人导览过程中,如果因为交互导览导览流程暂停,可以通过“继续导览”等话术,使机器人继续进行导览流程。
- 下一个导览点:在机器人导览过程中,可以通过“下一个点”,“下一个导览点”等话术,让机器人结束当前点的讲解,直接到下一个点进行讲解。
- 结束导览:在机器人导览过程中,可以通过“结束导览”,“停止导览”等话术,让机器人退出导览状态。
添加路线
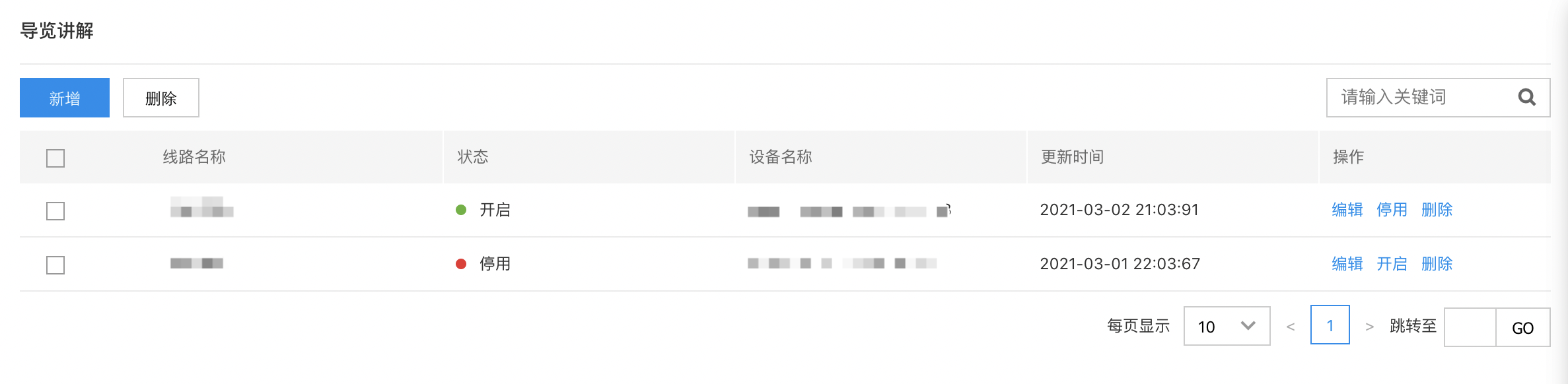
- 登录ABC Robot平台管理控制台,进入一个项目,左侧导航栏点击“运动管理>导览讲解”,进入“导览讲解”页面。
- 点击列表上方的“新增”按钮,进入路线编辑流程。
-
在路线新增页面,填写路线基本信息。
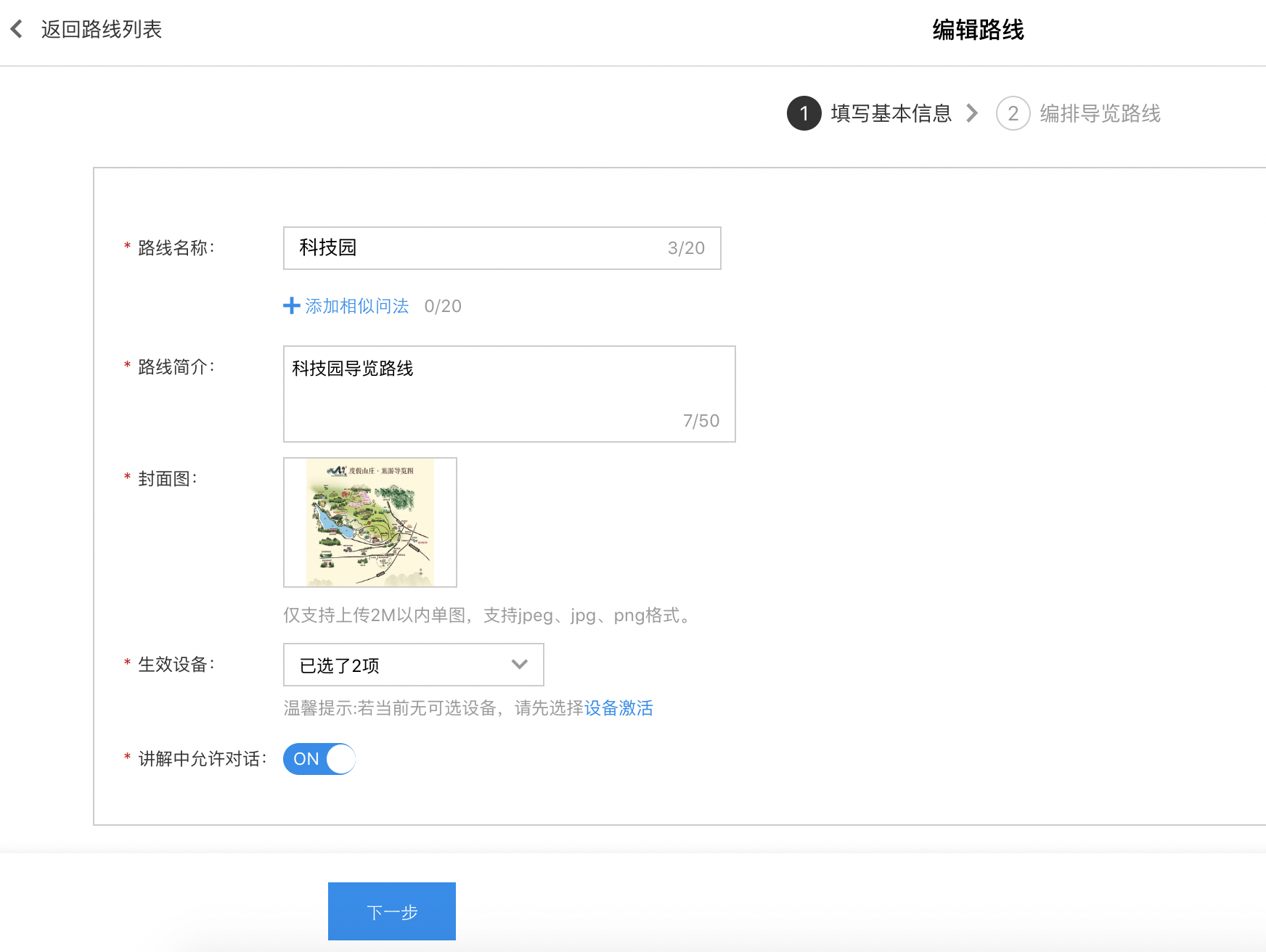
字段名称 说明 路线名称 可添加路线名称的相似问法,用于直接触发对应导览路线,比如“带我参观科技园”,科技园即为线路名称或线路名称相似问法 路线简介 用于路线描述,用于路线说明 封面图 支持jpg、jpeg、png格式,大小5m以内 生效设备 多选下拉菜单,选中后,该路线只对选中设备生效 讲解中允许对话 关闭后,导览过程中机器人不响应用户的对话,只进行讲解;开启后,机器人在导览过程中会响应用户的对话,但不会打断当前的导览流程,在响应用户的对话后,会继续进行导览。 -
在路线新增页面,填写完基本信息后,点击下一步,编排导览路线信息。
4.1 导览路线第一个点默认为“接待点”,不可以删除或调整顺序,接待点可以添加开场白,开场白为多行文本输入框。
4.2 导览路线最后一个点为“结束点”,不可以删除或调整顺序。
4.3 途中串词用于两个讲解点之间的过渡串讲。
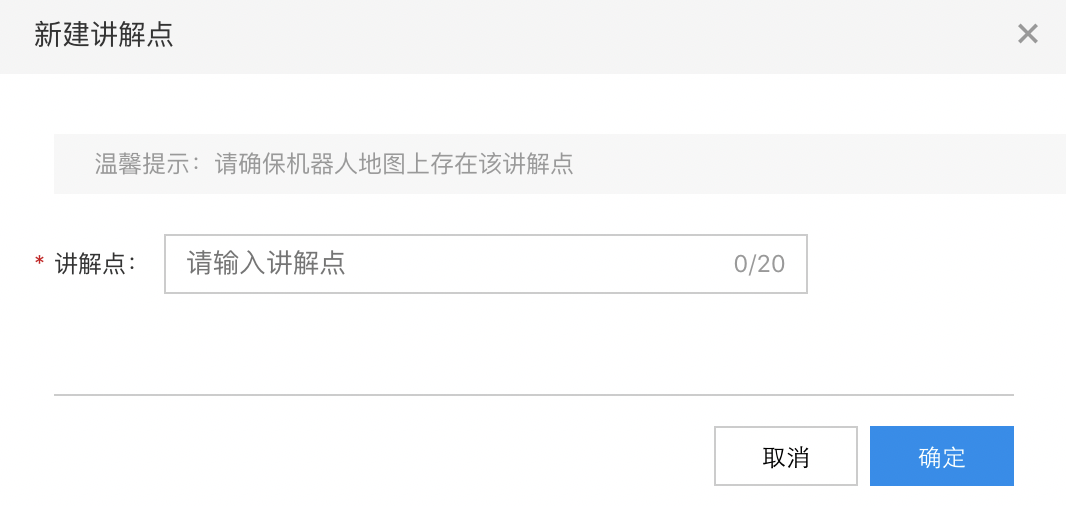
4.4 点击“添加讲解点”,出现添加讲解点弹框。输入讲解点名称,点击确定,即可完成讲解点添加。注意讲解点名称必须在机器人地图上存在。
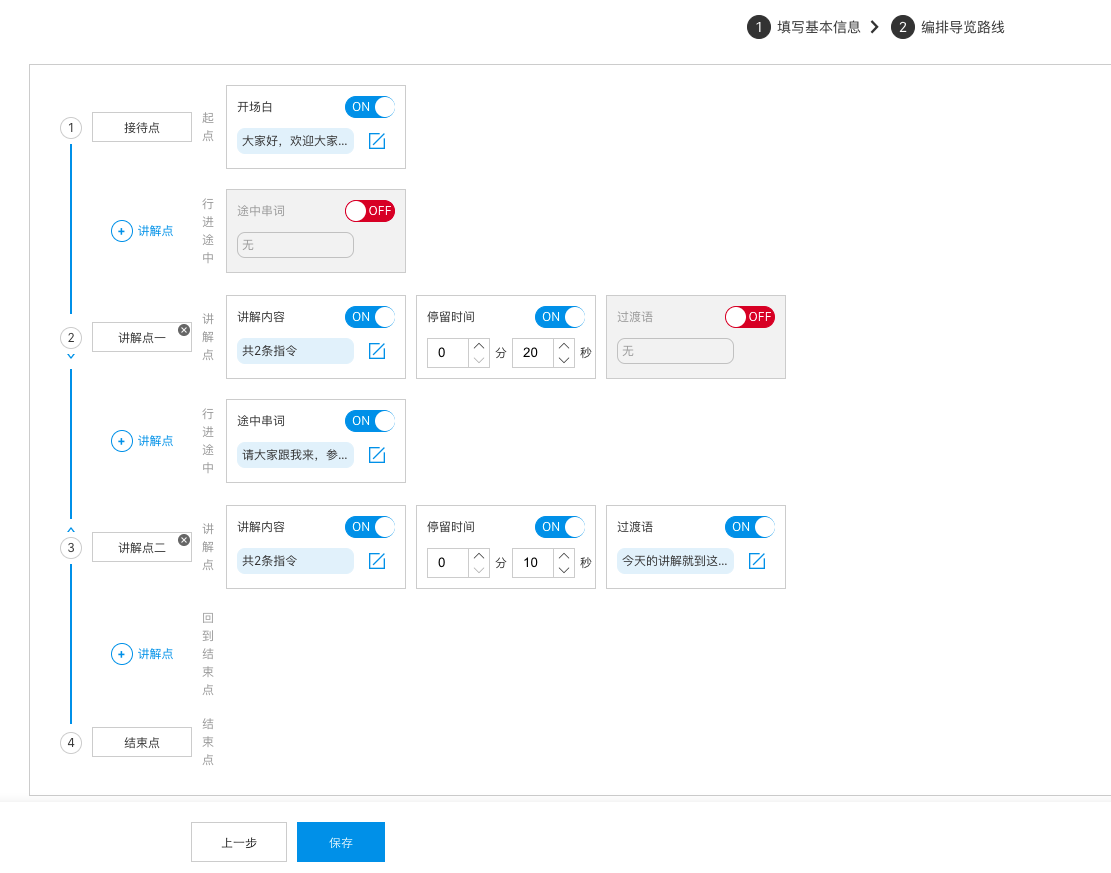
4.5 添加讲解点后,路线上出现对应的讲解点,如下图所示:

4.5.1 路线左侧可对讲解点位置上下移动(移动时该点对应的内容也移动),以及删除讲解点。
4.5.2 路线右侧为机器人在该讲解点时,对应的交互内容,包括:讲解内容、停留时间、过渡语。每张卡片都可设置开关状态。当卡片开关状态为开时,必须填写卡片的内容,否则无法保存。
(1)讲解内容:当未编辑时,提示文字显示“无”,编辑后,提示文字显示“共X个指令”;点击讲解内容编辑按钮,出现如下弹框:
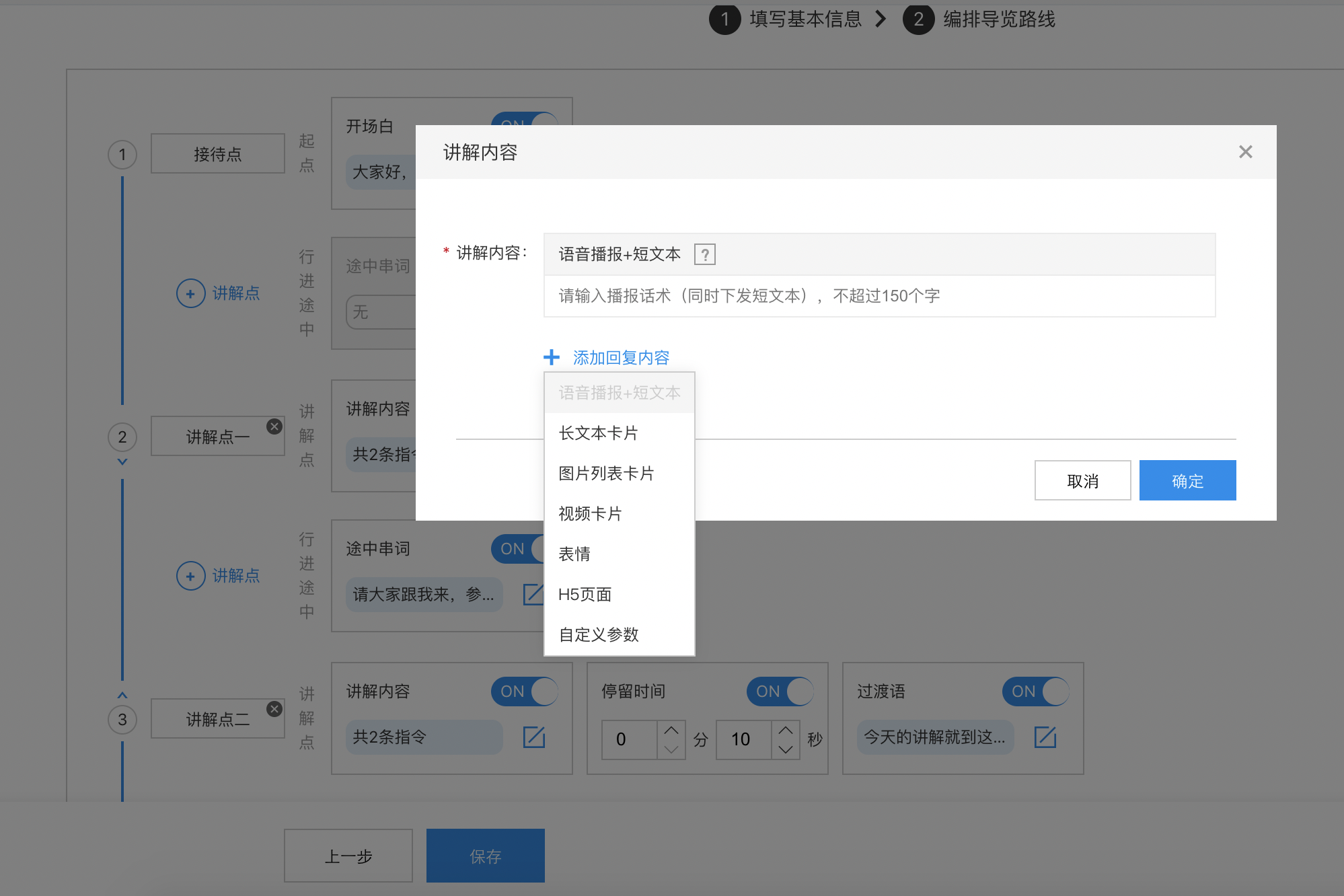
讲解内容支持短文本、长文本、图片、视频、H5页面等。
(2)停用时间:机器人在该讲解点讲解完毕后,需要停留的时间。
(3)过渡语:当未编辑时,提示文字显示“无”,编辑后,提示文字显示对应的文本内容。
- 点击“保存”,添加完成。如果需要修改基本信息,可点击“上一步”,返回基本信息页面进行修改。
- 新增路线后,需要重启该路线关联的机器人app,该路线数据才会被加载到机器人端。
编辑路线
- 在“运动管理>导览讲解”页面,找到要编辑的路线,点击列表操作项中的“编辑”按钮,即可编辑路线信息。
- 编辑操作同“添加路线”。
- 编辑路线后,需要重启该路线关联的机器人app,该路线的更新数据才会被加载到机器人端。
停用路线
- 在“运动管理>导览讲解”页面,找到要停用的路线,点击列表操作项中的“停用”按钮,即可停用路线。
- 停用后,需要重启该路线关联的机器人app,机器人端才会清除该路线数据缓存。
删除路线
- 方法一:单个删除。在“运动管理>导览讲解”页面,找到要删除的路线,点击列表操作项中的“删除”按钮,即可删除该路线。
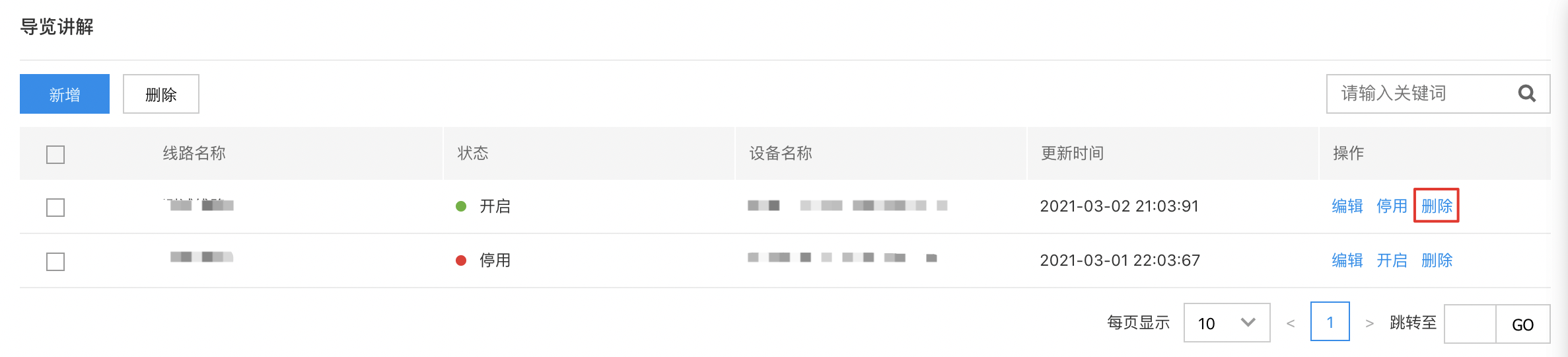
- 方法二:批量删除。在“运动管理>导览讲解”页面,勾选多个列表项,点击列表上方的“删除”按钮,即可批量删除选中的路线。

- 删除路线后,重启该路线关联的机器人app,机器人端才会清除该路线数据缓存。
评价此篇文章